Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning with Predictive Control for Human Motion Tracking
Paper and Code
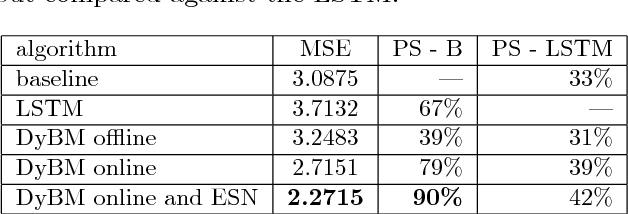
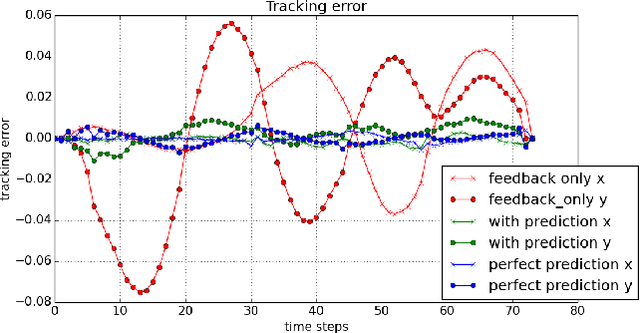
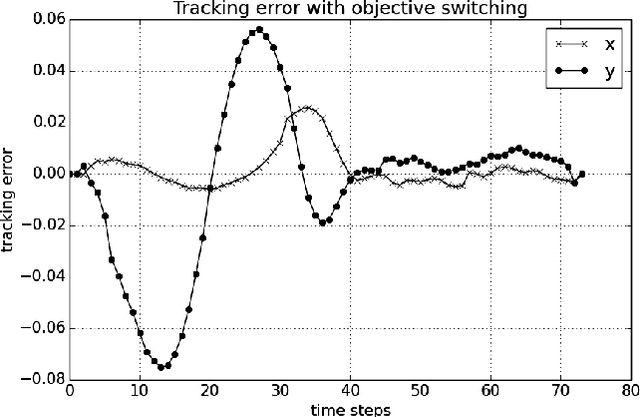
We propose to combine model predictive control with deep learning for the task of accurate human motion tracking with a robot. We design the MPC to allow switching between the learned and a conservative prediction. We also explored online learning with a DyBM model. We applied this method to human handwriting motion tracking with a UR-5 robot. The results show that the framework significantly improves tracking performance.
* To appear in 36th Annual Conference of the Robotics Society of Japan
(RSJ 2018)
View paper on