 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFCoT-VL:Advancing Text-oriented Large Vision-Language Models with Efficient Visual Token Compression
Feb 22, 2025The rapid success of Vision Large Language Models (VLLMs) often depends on the high-resolution images with abundant visual tokens, which hinders training and deployment efficiency. Current training-free visual token compression methods exhibit serious performance degradation in tasks involving high-resolution, text-oriented image understanding and reasoning. In this paper, we propose an efficient visual token compression framework for text-oriented VLLMs in high-resolution scenarios. In particular, we employ a light-weight self-distillation pre-training stage to compress the visual tokens, requiring a limited numbers of image-text pairs and minimal learnable parameters. Afterwards, to mitigate potential performance degradation of token-compressed models, we construct a high-quality post-train stage. To validate the effectiveness of our method, we apply it to an advanced VLLMs, InternVL2. Experimental results show that our approach significantly reduces computational overhead while outperforming the baselines across a range of text-oriented benchmarks. We will release the models and code soon.
RoomDreamer: Text-Driven 3D Indoor Scene Synthesis with Coherent Geometry and Texture
May 18, 2023



The techniques for 3D indoor scene capturing are widely used, but the meshes produced leave much to be desired. In this paper, we propose "RoomDreamer", which leverages powerful natural language to synthesize a new room with a different style. Unlike existing image synthesis methods, our work addresses the challenge of synthesizing both geometry and texture aligned to the input scene structure and prompt simultaneously. The key insight is that a scene should be treated as a whole, taking into account both scene texture and geometry. The proposed framework consists of two significant components: Geometry Guided Diffusion and Mesh Optimization. Geometry Guided Diffusion for 3D Scene guarantees the consistency of the scene style by applying the 2D prior to the entire scene simultaneously. Mesh Optimization improves the geometry and texture jointly and eliminates the artifacts in the scanned scene. To validate the proposed method, real indoor scenes scanned with smartphones are used for extensive experiments, through which the effectiveness of our method is demonstrated.
Ranking-Based Siamese Visual Tracking
May 24, 2022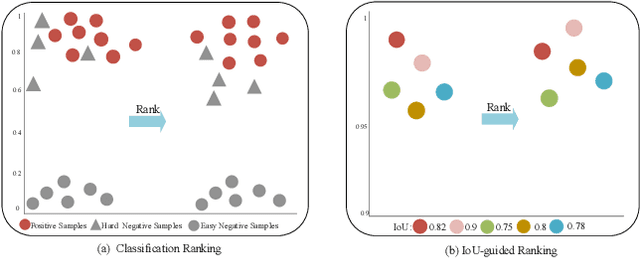



Current Siamese-based trackers mainly formulate the visual tracking into two independent subtasks, including classification and localization. They learn the classification subnetwork by processing each sample separately and neglect the relationship among positive and negative samples. Moreover, such tracking paradigm takes only the classification confidence of proposals for the final prediction, which may yield the misalignment between classification and localization. To resolve these issues, this paper proposes a ranking-based optimization algorithm to explore the relationship among different proposals. To this end, we introduce two ranking losses, including the classification one and the IoU-guided one, as optimization constraints. The classification ranking loss can ensure that positive samples rank higher than hard negative ones, i.e., distractors, so that the trackers can select the foreground samples successfully without being fooled by the distractors. The IoU-guided ranking loss aims to align classification confidence scores with the Intersection over Union(IoU) of the corresponding localization prediction for positive samples, enabling the well-localized prediction to be represented by high classification confidence. Specifically, the proposed two ranking losses are compatible with most Siamese trackers and incur no additional computation for inference. Extensive experiments on seven tracking benchmarks, including OTB100, UAV123, TC128, VOT2016, NFS30, GOT-10k and LaSOT, demonstrate the effectiveness of the proposed ranking-based optimization algorithm. The code and raw results are available at https://github.com/sansanfree/RBO.
Efficient Discriminative Nonorthogonal Binary Subspace with its Application to Visual Tracking
Sep 28, 2015

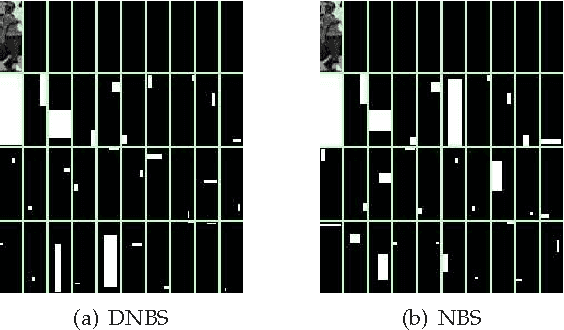

One of the crucial problems in visual tracking is how the object is represented. Conventional appearance-based trackers are using increasingly more complex features in order to be robust. However, complex representations typically not only require more computation for feature extraction, but also make the state inference complicated. We show that with a careful feature selection scheme, extremely simple yet discriminative features can be used for robust object tracking. The central component of the proposed method is a succinct and discriminative representation of the object using discriminative non-orthogonal binary subspace (DNBS) which is spanned by Haar-like features. The DNBS representation inherits the merits of the original NBS in that it efficiently describes the object. It also incorporates the discriminative information to distinguish foreground from background. However, the problem of finding the DNBS bases from an over-complete dictionary is NP-hard. We propose a greedy algorithm called discriminative optimized orthogonal matching pursuit (D-OOMP) to solve this problem. An iterative formulation named iterative D-OOMP is further developed to drastically reduce the redundant computation between iterations and a hierarchical selection strategy is integrated for reducing the search space of features. The proposed DNBS representation is applied to object tracking through SSD-based template matching. We validate the effectiveness of our method through extensive experiments on challenging videos with comparisons against several state-of-the-art trackers and demonstrate its capability to track objects in clutter and moving background.