 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Discriminative Nonorthogonal Binary Subspace with its Application to Visual Tracking
Paper and Code
Sep 28, 2015

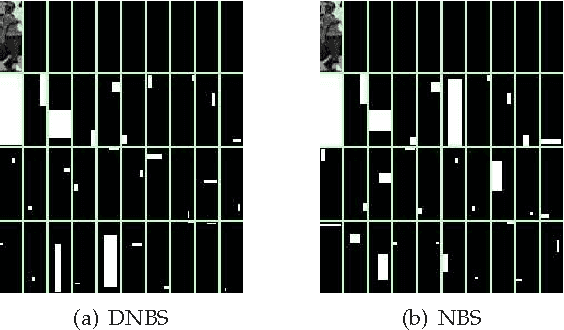

One of the crucial problems in visual tracking is how the object is represented. Conventional appearance-based trackers are using increasingly more complex features in order to be robust. However, complex representations typically not only require more computation for feature extraction, but also make the state inference complicated. We show that with a careful feature selection scheme, extremely simple yet discriminative features can be used for robust object tracking. The central component of the proposed method is a succinct and discriminative representation of the object using discriminative non-orthogonal binary subspace (DNBS) which is spanned by Haar-like features. The DNBS representation inherits the merits of the original NBS in that it efficiently describes the object. It also incorporates the discriminative information to distinguish foreground from background. However, the problem of finding the DNBS bases from an over-complete dictionary is NP-hard. We propose a greedy algorithm called discriminative optimized orthogonal matching pursuit (D-OOMP) to solve this problem. An iterative formulation named iterative D-OOMP is further developed to drastically reduce the redundant computation between iterations and a hierarchical selection strategy is integrated for reducing the search space of features. The proposed DNBS representation is applied to object tracking through SSD-based template matching. We validate the effectiveness of our method through extensive experiments on challenging videos with comparisons against several state-of-the-art trackers and demonstrate its capability to track objects in clutter and moving background.