 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Driving in Unstructured Environments: How Far Have We Come?
Oct 10, 2024
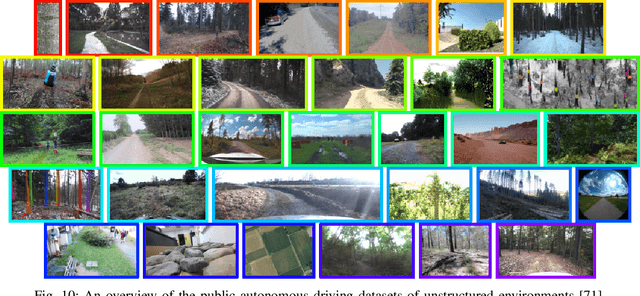
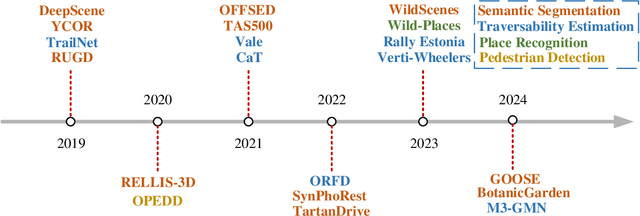
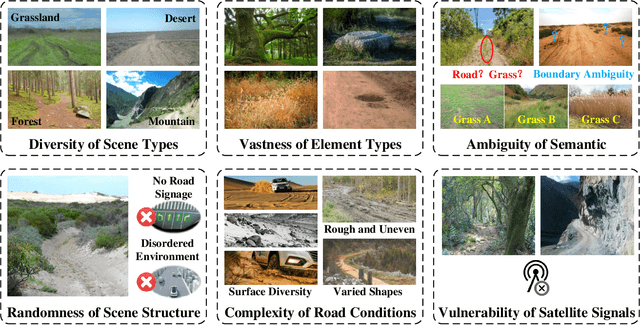
Research on autonomous driving in unstructured outdoor environments is less advanced than in structured urban settings due to challenges like environmental diversities and scene complexity. These environments-such as rural areas and rugged terrains-pose unique obstacles that are not common in structured urban areas. Despite these difficulties, autonomous driving in unstructured outdoor environments is crucial for applications in agriculture, mining, and military operations. Our survey reviews over 250 papers for autonomous driving in unstructured outdoor environments, covering offline mapping, pose estimation, environmental perception, path planning, end-to-end autonomous driving, datasets, and relevant challenges. We also discuss emerging trends and future research directions. This review aims to consolidate knowledge and encourage further research for autonomous driving in unstructured environments. To support ongoing work, we maintain an active repository with up-to-date literature and open-source projects at: https://github.com/chaytonmin/Survey-Autonomous-Driving-in-Unstructured-Environments.
Adversarial and Random Transformations for Robust Domain Adaptation and Generalization
Nov 13, 2022Data augmentation has been widely used to improve generalization in training deep neural networks. Recent works show that using worst-case transformations or adversarial augmentation strategies can significantly improve the accuracy and robustness. However, due to the non-differentiable properties of image transformations, searching algorithms such as reinforcement learning or evolution strategy have to be applied, which are not computationally practical for large scale problems. In this work, we show that by simply applying consistency training with random data augmentation, state-of-the-art results on domain adaptation (DA) and generalization (DG) can be obtained. To further improve the accuracy and robustness with adversarial examples, we propose a differentiable adversarial data augmentation method based on spatial transformer networks (STN). The combined adversarial and random transformations based method outperforms the state-of-the-art on multiple DA and DG benchmark datasets. Besides, the proposed method shows desirable robustness to corruption, which is also validated on commonly used datasets.