 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Electric Race Car Design
Nov 01, 2017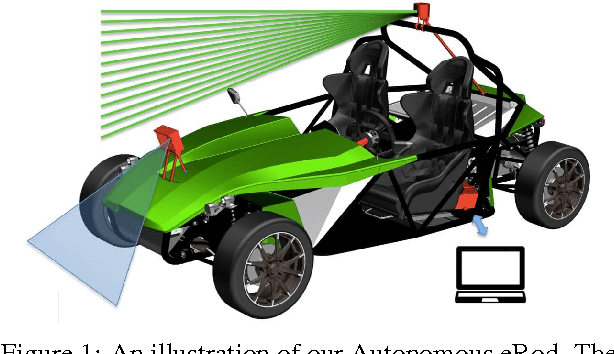
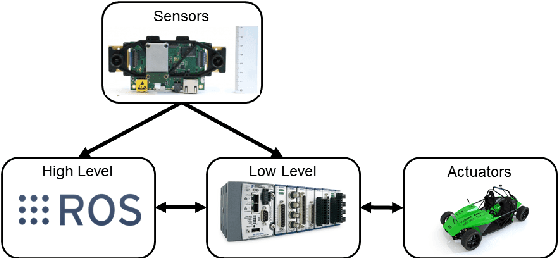
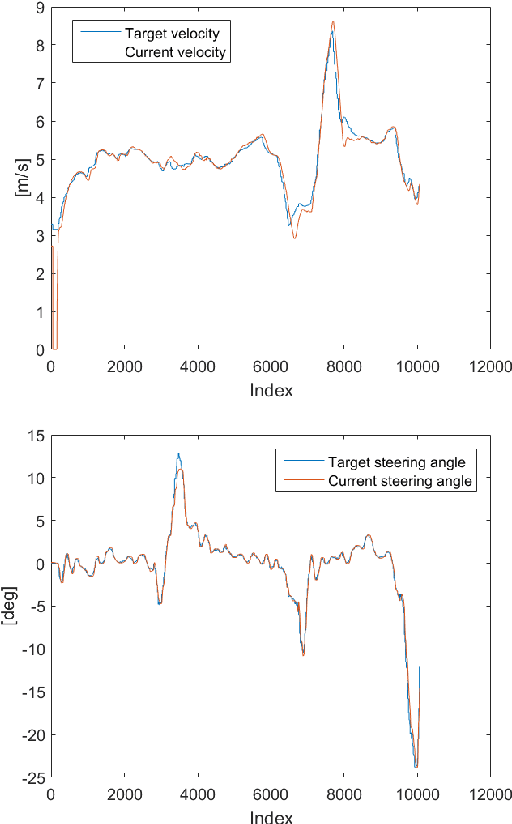
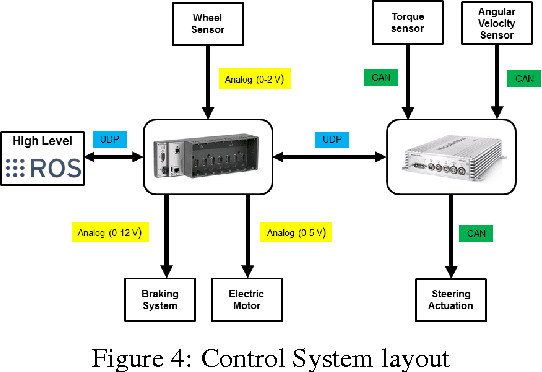
Autonomous driving and electric vehicles are nowadays very active research and development areas. In this paper we present the conversion of a standard Kyburz eRod into an autonomous vehicle that can be operated in challenging environments such as Swiss mountain passes. The overall hardware and software architectures are described in detail with a special emphasis on the sensor requirements for autonomous vehicles operating in partially structured environments. Furthermore, the design process itself and the finalized system architecture are presented. The work shows state of the art results in localization and controls for self-driving high-performance electric vehicles. Test results of the overall system are presented, which show the importance of generalizable state estimation algorithms to handle a plethora of conditions.
Adapting Low-Cost Platforms for Robotics Research
May 20, 2017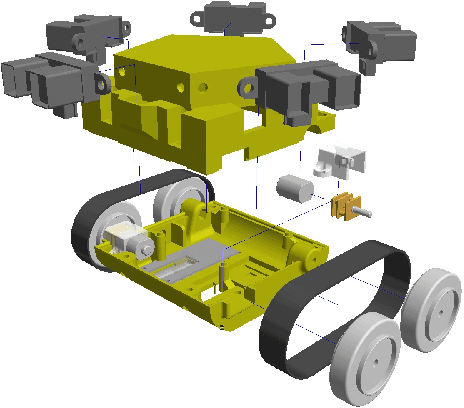
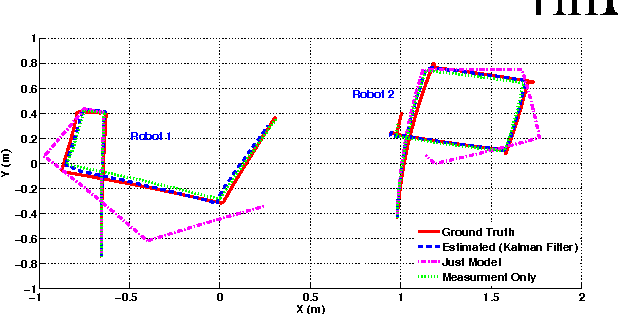
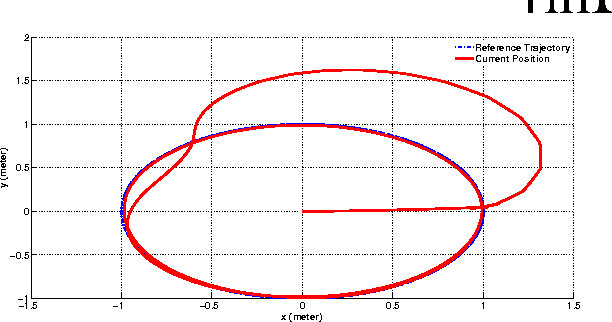
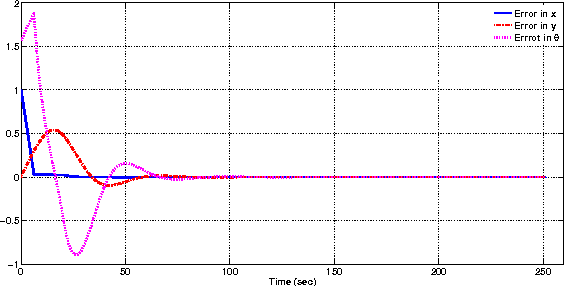
Validation of robotics theory on real-world hardware platforms is important to prove the practical feasibility of algorithms. This paper discusses some of the lessons learned while adapting the EvoBot, a low-cost robotics platform that we designed and prototyped, for research in diverse areas in robotics. The EvoBot platform was designed to be a low cost, open source, general purpose robotics platform intended to enable testing and validation of algorithms from a wide variety of sub-fields of robotics. Throughout the paper, we outline and discuss some common failures, practical limitations and inconsistencies between theory and practice that one may encounter while adapting such low-cost platforms for robotics research. We demonstrate these aspects through four representative common robotics tasks- localization, real-time control, swarm consensus and path planning applications, performed using the EvoBots. We also propose some potential solutions to the encountered problems and try to generalize them.
* FinE-r@IROS, 2015, 7 pages, 5 figures
Identification and Off-Policy Learning of Multiple Objectives Using Adaptive Clustering
May 17, 2017

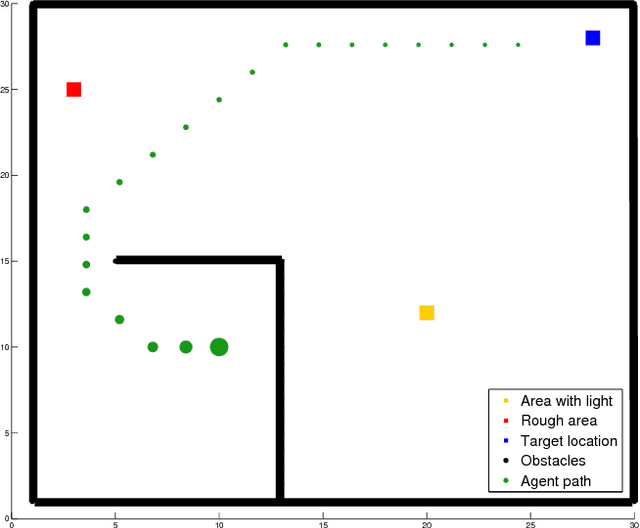

In this work, we present a methodology that enables an agent to make efficient use of its exploratory actions by autonomously identifying possible objectives in its environment and learning them in parallel. The identification of objectives is achieved using an online and unsupervised adaptive clustering algorithm. The identified objectives are learned (at least partially) in parallel using Q-learning. Using a simulated agent and environment, it is shown that the converged or partially converged value function weights resulting from off-policy learning can be used to accumulate knowledge about multiple objectives without any additional exploration. We claim that the proposed approach could be useful in scenarios where the objectives are initially unknown or in real world scenarios where exploration is typically a time and energy intensive process. The implications and possible extensions of this work are also briefly discussed.
Swarm-Enabling Technology for Multi-Robot Systems
May 11, 2017
Swarm robotics has experienced a rapid expansion in recent years, primarily fueled by specialized multi-robot systems developed to achieve dedicated collective actions. These specialized platforms are in general designed with swarming considerations at the front and center. Key hardware and software elements required for swarming are often deeply embedded and integrated with the particular system. However, given the noticeable increase in the number of low-cost mobile robots readily available, practitioners and hobbyists may start considering to assemble full-fledged swarms by minimally retrofitting such mobile platforms with a swarm-enabling technology. Here, we report one possible embodiment of such a technology designed to enable the assembly and the study of swarming in a range of general-purpose robotic systems. This is achieved by combining a modular and transferable software toolbox with a hardware suite composed of a collection of low-cost and off-the-shelf components. The developed technology can be ported to a relatively vast range of robotic platforms with minimal changes and high levels of scalability. This swarm-enabling technology has successfully been implemented on two distinct distributed multi-robot systems, a swarm of mobile marine buoys and a team of commercial terrestrial robots. We have tested the effectiveness of both of these distributed robotic systems in performing collective exploration and search scenarios, as well as other classical cooperative behaviors. Experimental results on different swarm behaviors are reported for the two platforms in uncontrolled environments and without any supporting infrastructure. The design of the associated software library allows for a seamless switch to other cooperative behaviors, and also offers the possibility to simulate newly designed collective behaviors prior to their implementation onto the platforms.