 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sequential Deep Learning Algorithm for Sampled Mixed-integer Optimisation Problems
Jan 25, 2023



Mixed-integer optimisation problems can be computationally challenging. Here, we introduce and analyse two efficient algorithms with a specific sequential design that are aimed at dealing with sampled problems within this class. At each iteration step of both algorithms, we first test the feasibility of a given test solution for each and every constraint associated with the sampled optimisation at hand, while also identifying those constraints that are violated. Subsequently, an optimisation problem is constructed with a constraint set consisting of the current basis -- namely the smallest set of constraints that fully specifies the current test solution -- as well as constraints related to a limited number of the identified violating samples. We show that both algorithms exhibit finite-time convergence towards the optimal solution. Algorithm 2 features a neural network classifier that notably improves the computational performance compared to Algorithm 1. We establish quantitatively the efficacy of these algorithms by means of three numerical tests: robust optimal power flow, robust unit commitment, and robust random mixed-integer linear program.
Adapting Low-Cost Platforms for Robotics Research
May 20, 2017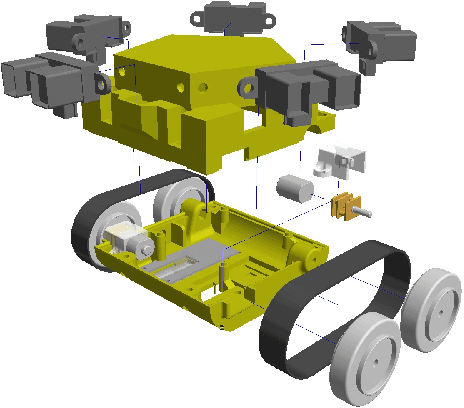
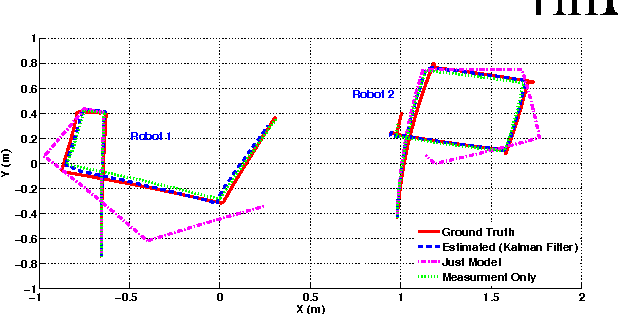
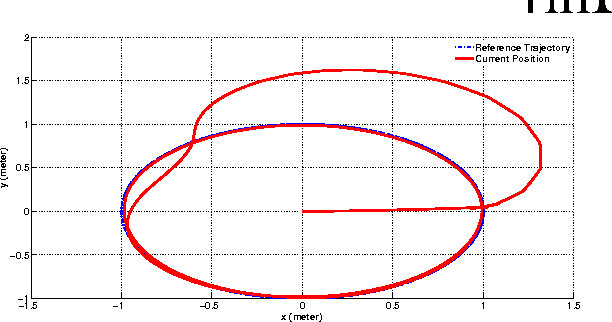
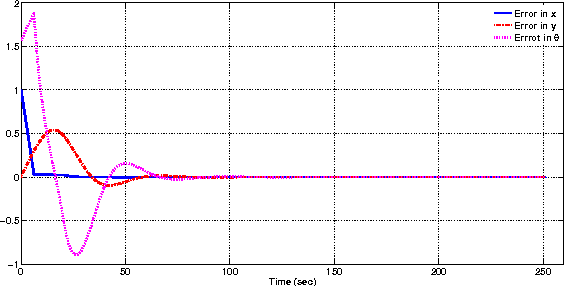
Validation of robotics theory on real-world hardware platforms is important to prove the practical feasibility of algorithms. This paper discusses some of the lessons learned while adapting the EvoBot, a low-cost robotics platform that we designed and prototyped, for research in diverse areas in robotics. The EvoBot platform was designed to be a low cost, open source, general purpose robotics platform intended to enable testing and validation of algorithms from a wide variety of sub-fields of robotics. Throughout the paper, we outline and discuss some common failures, practical limitations and inconsistencies between theory and practice that one may encounter while adapting such low-cost platforms for robotics research. We demonstrate these aspects through four representative common robotics tasks- localization, real-time control, swarm consensus and path planning applications, performed using the EvoBots. We also propose some potential solutions to the encountered problems and try to generalize them.
* FinE-r@IROS, 2015, 7 pages, 5 figures
Swarm-Enabling Technology for Multi-Robot Systems
May 11, 2017
Swarm robotics has experienced a rapid expansion in recent years, primarily fueled by specialized multi-robot systems developed to achieve dedicated collective actions. These specialized platforms are in general designed with swarming considerations at the front and center. Key hardware and software elements required for swarming are often deeply embedded and integrated with the particular system. However, given the noticeable increase in the number of low-cost mobile robots readily available, practitioners and hobbyists may start considering to assemble full-fledged swarms by minimally retrofitting such mobile platforms with a swarm-enabling technology. Here, we report one possible embodiment of such a technology designed to enable the assembly and the study of swarming in a range of general-purpose robotic systems. This is achieved by combining a modular and transferable software toolbox with a hardware suite composed of a collection of low-cost and off-the-shelf components. The developed technology can be ported to a relatively vast range of robotic platforms with minimal changes and high levels of scalability. This swarm-enabling technology has successfully been implemented on two distinct distributed multi-robot systems, a swarm of mobile marine buoys and a team of commercial terrestrial robots. We have tested the effectiveness of both of these distributed robotic systems in performing collective exploration and search scenarios, as well as other classical cooperative behaviors. Experimental results on different swarm behaviors are reported for the two platforms in uncontrolled environments and without any supporting infrastructure. The design of the associated software library allows for a seamless switch to other cooperative behaviors, and also offers the possibility to simulate newly designed collective behaviors prior to their implementation onto the platforms.