 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNiLBS: Neural Inverse Linear Blend Skinning
Apr 06, 2020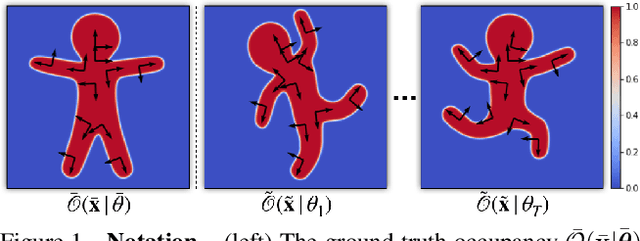
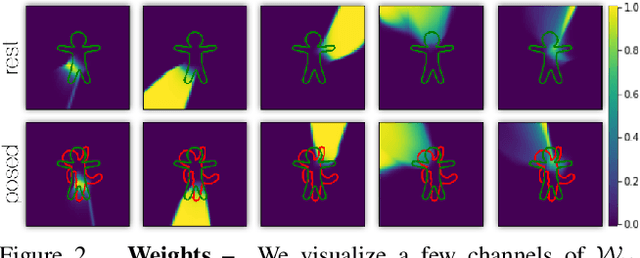
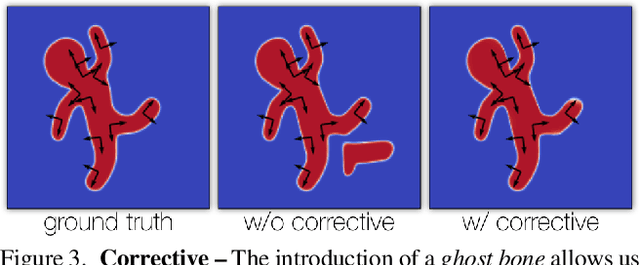
In this technical report, we investigate efficient representations of articulated objects (e.g. human bodies), which is an important problem in computer vision and graphics. To deform articulated geometry, existing approaches represent objects as meshes and deform them using "skinning" techniques. The skinning operation allows a wide range of deformations to be achieved with a small number of control parameters. This paper introduces a method to invert the deformations undergone via traditional skinning techniques via a neural network parameterized by pose. The ability to invert these deformations allows values (e.g., distance function, signed distance function, occupancy) to be pre-computed at rest pose, and then efficiently queried when the character is deformed. We leave empirical evaluation of our approach to future work.
NASA: Neural Articulated Shape Approximation
Dec 06, 2019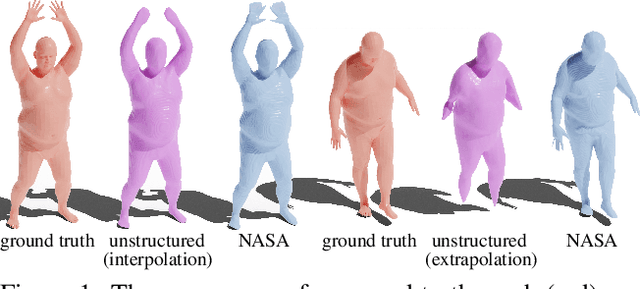
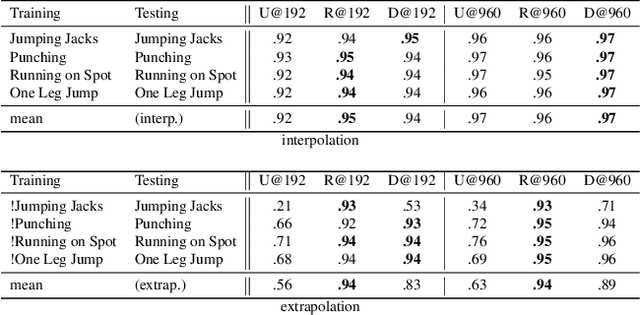


Efficient representation of articulated objects such as human bodies is an important problem in computer vision and graphics. To efficiently simulate deformation, existing approaches represent objects as meshes and deform them using skinning techniques. This paper introduces neural articulated shape approximation (NASA), a framework that enables efficient representation of articulated deformable objects using neural indicator functions parameterized by pose. In contrast to classic approaches, NASA avoids the need to convert between different representations. For occupancy testing, NASA circumvents the complexity of meshes and mitigates the issue of water-tightness. In comparison with regular grids and octrees, our approach provides high resolution without high memory use.
Adapting Low-Cost Platforms for Robotics Research
May 20, 2017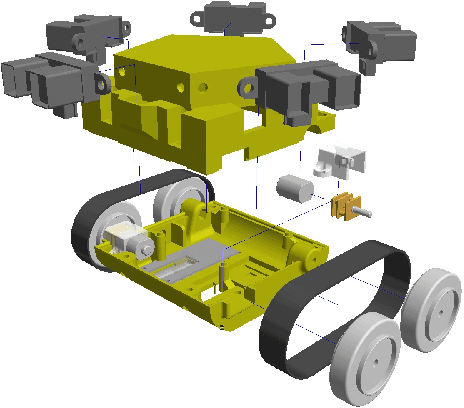
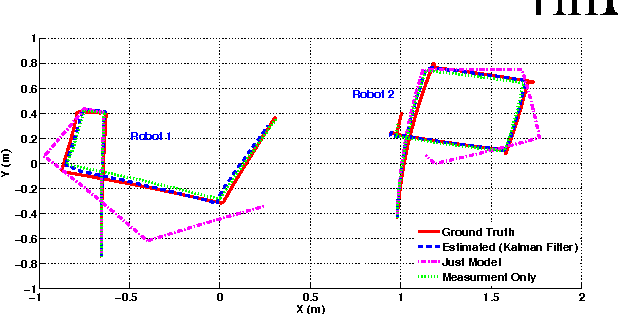
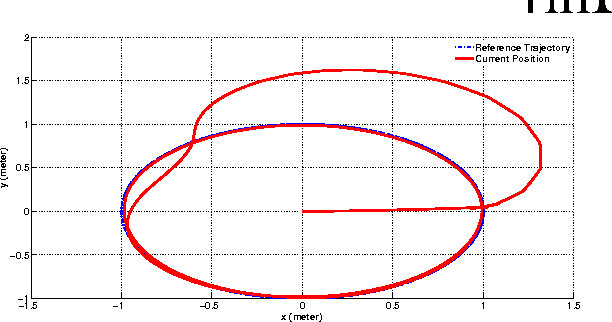
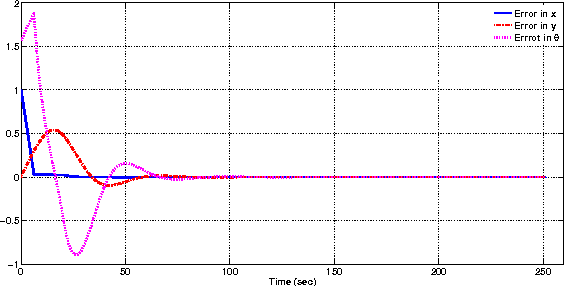
Validation of robotics theory on real-world hardware platforms is important to prove the practical feasibility of algorithms. This paper discusses some of the lessons learned while adapting the EvoBot, a low-cost robotics platform that we designed and prototyped, for research in diverse areas in robotics. The EvoBot platform was designed to be a low cost, open source, general purpose robotics platform intended to enable testing and validation of algorithms from a wide variety of sub-fields of robotics. Throughout the paper, we outline and discuss some common failures, practical limitations and inconsistencies between theory and practice that one may encounter while adapting such low-cost platforms for robotics research. We demonstrate these aspects through four representative common robotics tasks- localization, real-time control, swarm consensus and path planning applications, performed using the EvoBots. We also propose some potential solutions to the encountered problems and try to generalize them.
* FinE-r@IROS, 2015, 7 pages, 5 figures