 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoMP: Predicting Volumetric Mechanical Property Fields
Oct 27, 2025Physical simulation relies on spatially-varying mechanical properties, often laboriously hand-crafted. VoMP is a feed-forward method trained to predict Young's modulus ($E$), Poisson's ratio ($\nu$), and density ($\rho$) throughout the volume of 3D objects, in any representation that can be rendered and voxelized. VoMP aggregates per-voxel multi-view features and passes them to our trained Geometry Transformer to predict per-voxel material latent codes. These latents reside on a manifold of physically plausible materials, which we learn from a real-world dataset, guaranteeing the validity of decoded per-voxel materials. To obtain object-level training data, we propose an annotation pipeline combining knowledge from segmented 3D datasets, material databases, and a vision-language model, along with a new benchmark. Experiments show that VoMP estimates accurate volumetric properties, far outperforming prior art in accuracy and speed.
Rigid Body Adversarial Attacks
Feb 08, 2025



Due to their performance and simplicity, rigid body simulators are often used in applications where the objects of interest can considered very stiff. However, no material has infinite stiffness, which means there are potentially cases where the non-zero compliance of the seemingly rigid object can cause a significant difference between its trajectories when simulated in a rigid body or deformable simulator. Similarly to how adversarial attacks are developed against image classifiers, we propose an adversarial attack against rigid body simulators. In this adversarial attack, we solve an optimization problem to construct perceptually rigid adversarial objects that have the same collision geometry and moments of mass to a reference object, so that they behave identically in rigid body simulations but maximally different in more accurate deformable simulations. We demonstrate the validity of our method by comparing simulations of several examples in commercially available simulators.
Neurally Integrated Finite Elements for Differentiable Elasticity on Evolving Domains
Oct 12, 2024



We present an elastic simulator for domains defined as evolving implicit functions, which is efficient, robust, and differentiable with respect to both shape and material. This simulator is motivated by applications in 3D reconstruction: it is increasingly effective to recover geometry from observed images as implicit functions, but physical applications require accurately simulating and optimizing-for the behavior of such shapes under deformation, which has remained challenging. Our key technical innovation is to train a small neural network to fit quadrature points for robust numerical integration on implicit grid cells. When coupled with a Mixed Finite Element formulation, this yields a smooth, fully differentiable simulation model connecting the evolution of the underlying implicit surface to its elastic response. We demonstrate the efficacy of our approach on forward simulation of implicits, direct simulation of 3D shapes during editing, and novel physics-based shape and topology optimizations in conjunction with differentiable rendering.
Data-Free Learning of Reduced-Order Kinematics
May 05, 2023Physical systems ranging from elastic bodies to kinematic linkages are defined on high-dimensional configuration spaces, yet their typical low-energy configurations are concentrated on much lower-dimensional subspaces. This work addresses the challenge of identifying such subspaces automatically: given as input an energy function for a high-dimensional system, we produce a low-dimensional map whose image parameterizes a diverse yet low-energy submanifold of configurations. The only additional input needed is a single seed configuration for the system to initialize our procedure; no dataset of trajectories is required. We represent subspaces as neural networks that map a low-dimensional latent vector to the full configuration space, and propose a training scheme to fit network parameters to any system of interest. This formulation is effective across a very general range of physical systems; our experiments demonstrate not only nonlinear and very low-dimensional elastic body and cloth subspaces, but also more general systems like colliding rigid bodies and linkages. We briefly explore applications built on this formulation, including manipulation, latent interpolation, and sampling.
Multi-Agent Path Planning with Asymmetric Interactions In Tight Spaces
Apr 01, 2022
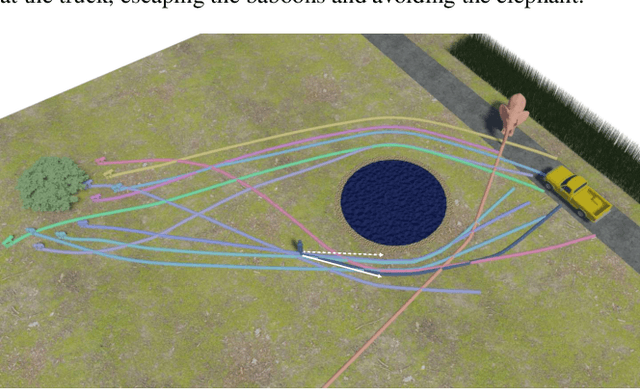


By starting with the assumption that motion is fundamentally a decision making problem, we use the world-line concept from Special Relativity as the inspiration for a novel multi-agent path planning method. We have identified a particular set of problems that have so far been overlooked by previous works. We present our solution for the global path planning problem for each agent and ensure smooth local collision avoidance for each pair of agents in the scene. We accomplish this by modeling the trajectories of the agents through 2D space and time as curves in 3D. Global path planning is solved using a modified Djikstra's algorithm to ensure that initial trajectories for agents do not intersect. We then solve for smooth local trajectories using a quasi-Newton interior point solver, providing the trajectory curves with a radius to turn them into rods. Subsequently, resolving collision of the rods ensures that no two agents are in the same spatial position at the same time. This space-time formulation allows us to simulate previously ignored phenomena such as highly asymmetric interactions in very constrained environments. It also provides a solution for scenes with unnaturally symmetric agent alignments without the need for jittering agent positions or velocities.
NiLBS: Neural Inverse Linear Blend Skinning
Apr 06, 2020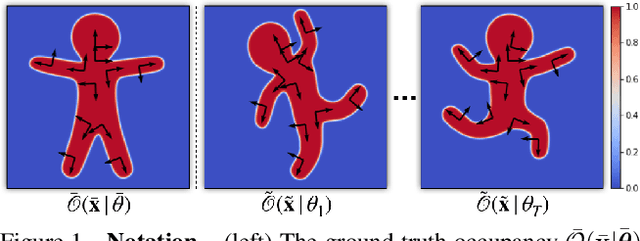
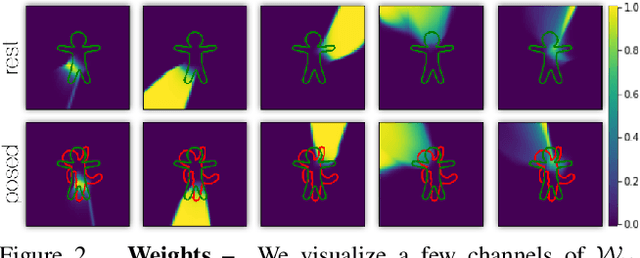
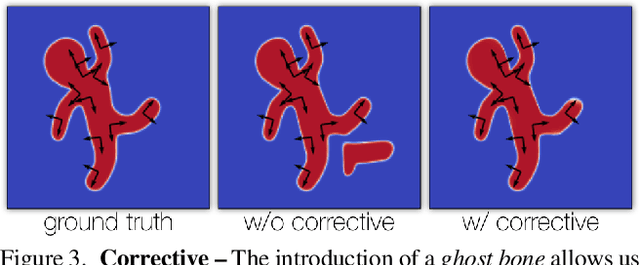
In this technical report, we investigate efficient representations of articulated objects (e.g. human bodies), which is an important problem in computer vision and graphics. To deform articulated geometry, existing approaches represent objects as meshes and deform them using "skinning" techniques. The skinning operation allows a wide range of deformations to be achieved with a small number of control parameters. This paper introduces a method to invert the deformations undergone via traditional skinning techniques via a neural network parameterized by pose. The ability to invert these deformations allows values (e.g., distance function, signed distance function, occupancy) to be pre-computed at rest pose, and then efficiently queried when the character is deformed. We leave empirical evaluation of our approach to future work.