 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptNet: Policy Adaptation for Physics-Based Character Control
Oct 09, 2023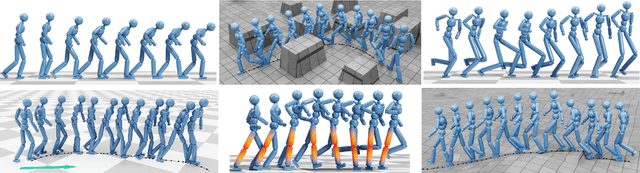
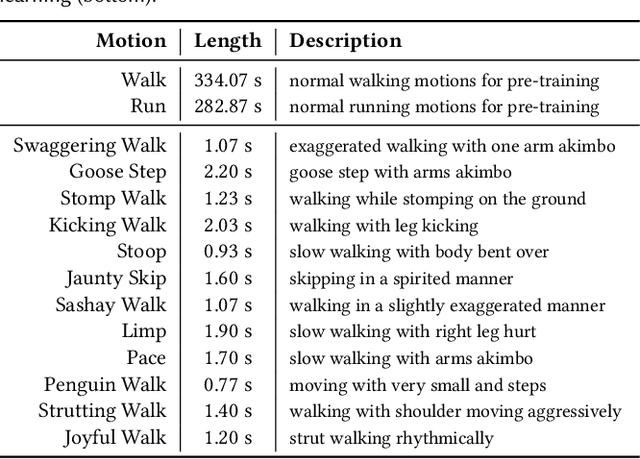
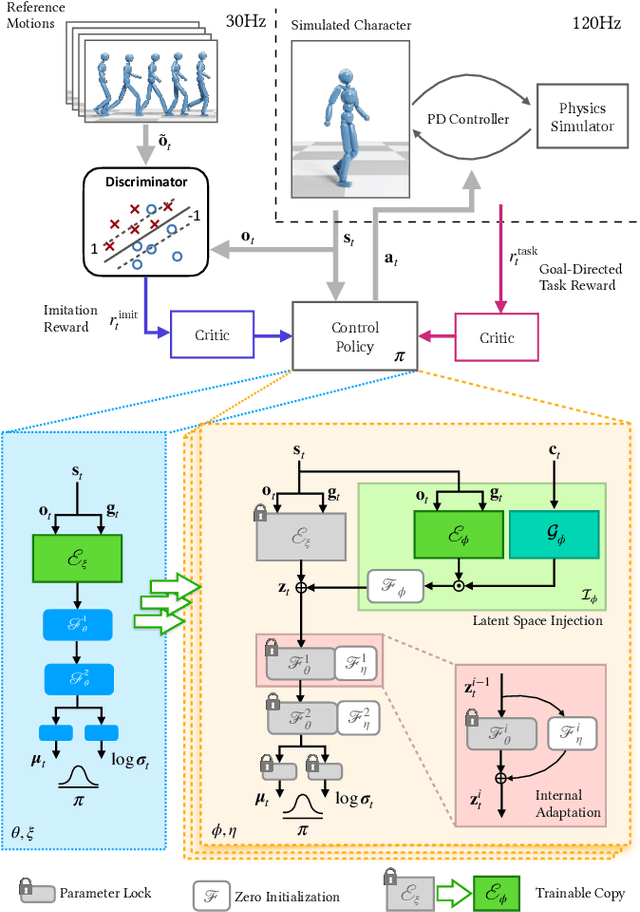
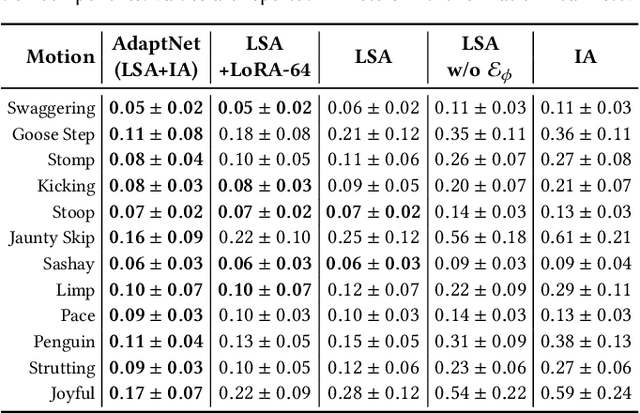
Motivated by humans' ability to adapt skills in the learning of new ones, this paper presents AdaptNet, an approach for modifying the latent space of existing policies to allow new behaviors to be quickly learned from like tasks in comparison to learning from scratch. Building on top of a given reinforcement learning controller, AdaptNet uses a two-tier hierarchy that augments the original state embedding to support modest changes in a behavior and further modifies the policy network layers to make more substantive changes. The technique is shown to be effective for adapting existing physics-based controllers to a wide range of new styles for locomotion, new task targets, changes in character morphology and extensive changes in environment. Furthermore, it exhibits significant increase in learning efficiency, as indicated by greatly reduced training times when compared to training from scratch or using other approaches that modify existing policies. Code is available at https://motion-lab.github.io/AdaptNet.
* SIGGRAPH Asia 2023. Video: https://youtu.be/WxmJSCNFb28. Website: https://motion-lab.github.io/AdaptNet, https://pei-xu.github.io/AdaptNet
Data-Free Learning of Reduced-Order Kinematics
May 05, 2023Physical systems ranging from elastic bodies to kinematic linkages are defined on high-dimensional configuration spaces, yet their typical low-energy configurations are concentrated on much lower-dimensional subspaces. This work addresses the challenge of identifying such subspaces automatically: given as input an energy function for a high-dimensional system, we produce a low-dimensional map whose image parameterizes a diverse yet low-energy submanifold of configurations. The only additional input needed is a single seed configuration for the system to initialize our procedure; no dataset of trajectories is required. We represent subspaces as neural networks that map a low-dimensional latent vector to the full configuration space, and propose a training scheme to fit network parameters to any system of interest. This formulation is effective across a very general range of physical systems; our experiments demonstrate not only nonlinear and very low-dimensional elastic body and cloth subspaces, but also more general systems like colliding rigid bodies and linkages. We briefly explore applications built on this formulation, including manipulation, latent interpolation, and sampling.