 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Multi-Floor Exploration by a Swarm of Miniature Robots Teaming with Wall-Climbing Units
Aug 16, 2019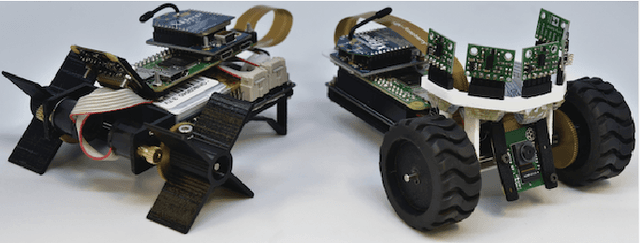
In this paper, we consider the problem of collectively exploring unknown and dynamic environments with a decentralized heterogeneous multi-robot system consisting of multiple units of two variants of a miniature robot. The first variant-a wheeled ground unit-is at the core of a swarm of floor-mapping robots exhibiting scalability, robustness and flexibility. These properties are systematically tested and quantitatively evaluated in unstructured and dynamic environments, in the absence of any supporting infrastructure. The results of repeated sets of experiments show a consistent performance for all three features, as well as the possibility to inject units into the system while it is operating. Several units of the second variant-a wheg-based wall-climbing unit-are used to support the swarm of mapping robots when simultaneously exploring multiple floors by expanding the distributed communication channel necessary for the coordinated behavior among platforms. Although the occupancy-grid maps obtained can be large, they are fully distributed. Not a single robotic unit possesses the overall map, which is not required by our cooperative path-planning strategy.
A Decentralized Mobile Computing Network for Multi-Robot Systems Operations
Oct 13, 2018



Collective animal behaviors are paradigmatic examples of fully decentralized operations involving complex collective computations such as collective turns in flocks of birds or collective harvesting by ants. These systems offer a unique source of inspiration for the development of fault-tolerant and self-healing multi-robot systems capable of operating in dynamic environments. Specifically, swarm robotics emerged and is significantly growing on these premises. However, to date, most swarm robotics systems reported in the literature involve basic computational tasks---averages and other algebraic operations. In this paper, we introduce a novel Collective computing framework based on the swarming paradigm, which exhibits the key innate features of swarms: robustness, scalability and flexibility. Unlike Edge computing, the proposed Collective computing framework is truly decentralized and does not require user intervention or additional servers to sustain its operations. This Collective computing framework is applied to the complex task of collective mapping, in which multiple robots aim at cooperatively map a large area. Our results confirm the effectiveness of the cooperative strategy, its robustness to the loss of multiple units, as well as its scalability. Furthermore, the topology of the interconnecting network is found to greatly influence the performance of the collective action.
Gradual Collective Upgrade of a Swarm of Autonomous Buoys for Dynamic Ocean Monitoring
Aug 31, 2018



Swarms of autonomous surface vehicles equipped with environmental sensors and decentralized communications bring a new wave of attractive possibilities for the monitoring of dynamic features in oceans and other waterbodies. However, a key challenge in swarm robotics design is the efficient collective operation of heterogeneous systems. We present both theoretical analysis and field experiments on the responsiveness in dynamic area coverage of a collective of 22 autonomous buoys, where 4 units are upgraded to a new design that allows them to move 80\% faster than the rest. This system is able to react on timescales of the minute to changes in areas on the order of a few thousand square meters. We have observed that this partial upgrade of the system significantly increases its average responsiveness, without necessarily improving the spatial uniformity of the deployment. These experiments show that the autonomous buoy designs and the cooperative control rule described in this work provide an efficient, flexible, and scalable solution for the pervasive and persistent monitoring of water environments.
Swarm-Enabling Technology for Multi-Robot Systems
May 11, 2017
Swarm robotics has experienced a rapid expansion in recent years, primarily fueled by specialized multi-robot systems developed to achieve dedicated collective actions. These specialized platforms are in general designed with swarming considerations at the front and center. Key hardware and software elements required for swarming are often deeply embedded and integrated with the particular system. However, given the noticeable increase in the number of low-cost mobile robots readily available, practitioners and hobbyists may start considering to assemble full-fledged swarms by minimally retrofitting such mobile platforms with a swarm-enabling technology. Here, we report one possible embodiment of such a technology designed to enable the assembly and the study of swarming in a range of general-purpose robotic systems. This is achieved by combining a modular and transferable software toolbox with a hardware suite composed of a collection of low-cost and off-the-shelf components. The developed technology can be ported to a relatively vast range of robotic platforms with minimal changes and high levels of scalability. This swarm-enabling technology has successfully been implemented on two distinct distributed multi-robot systems, a swarm of mobile marine buoys and a team of commercial terrestrial robots. We have tested the effectiveness of both of these distributed robotic systems in performing collective exploration and search scenarios, as well as other classical cooperative behaviors. Experimental results on different swarm behaviors are reported for the two platforms in uncontrolled environments and without any supporting infrastructure. The design of the associated software library allows for a seamless switch to other cooperative behaviors, and also offers the possibility to simulate newly designed collective behaviors prior to their implementation onto the platforms.