 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-AGV's Temporal Memory-based RRT Exploration in Unknown Environment
Jul 15, 2022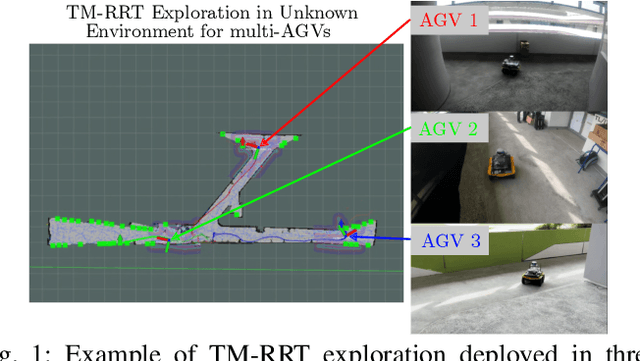
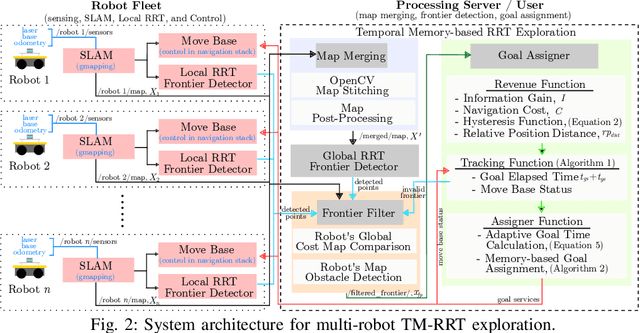
With the increasing need for multi-robot for exploring the unknown region in a challenging environment, efficient collaborative exploration strategies are needed for achieving such feat. A frontier-based Rapidly-Exploring Random Tree (RRT) exploration can be deployed to explore an unknown environment. However, its' greedy behavior causes multiple robots to explore the region with the highest revenue, which leads to massive overlapping in exploration process. To address this issue, we present a temporal memory-based RRT (TM-RRT) exploration strategy for multi-robot to perform robust exploration in an unknown environment. It computes adaptive duration for each frontier assigned and calculates the frontier's revenue based on the relative position of each robot. In addition, each robot is equipped with a memory consisting of frontier assigned and share among fleets to prevent repeating assignment of same frontier. Through both simulation and actual deployment, we have shown the robustness of TM-RRT exploration strategy by completing the exploration in a 25.0m x 54.0m (1350.0m2) area, while the conventional RRT exploration strategy falls short.
* 8 pages, 10 Figures
Decentralized Multi-Floor Exploration by a Swarm of Miniature Robots Teaming with Wall-Climbing Units
Aug 16, 2019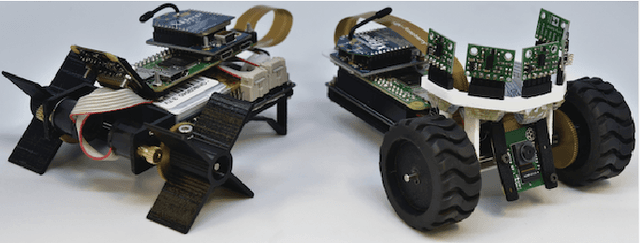
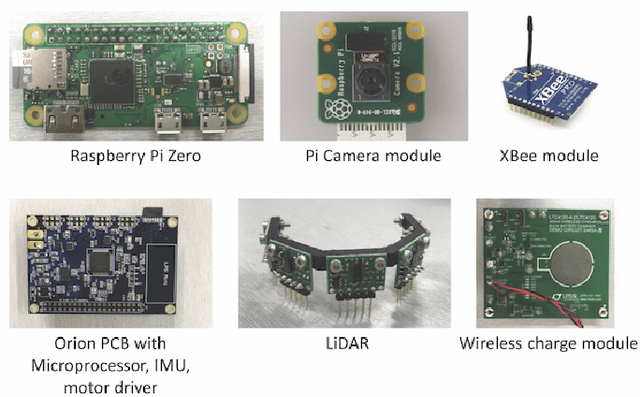
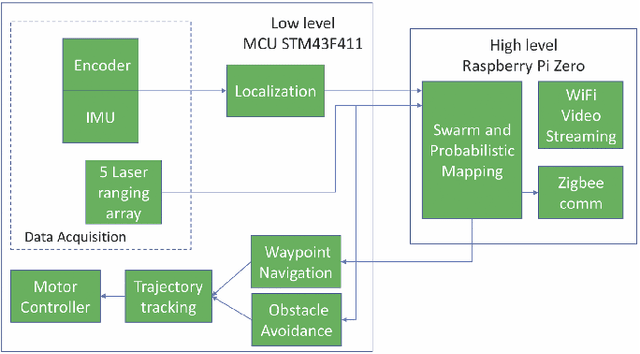
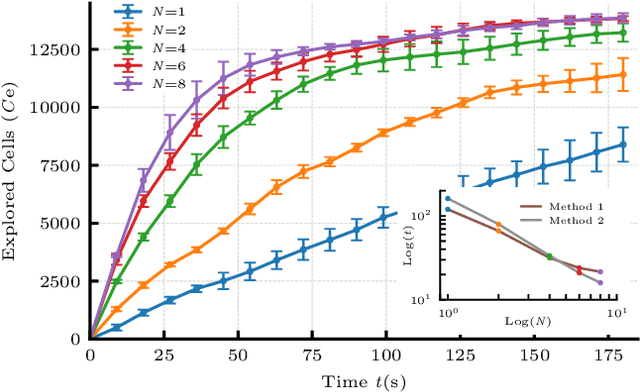
In this paper, we consider the problem of collectively exploring unknown and dynamic environments with a decentralized heterogeneous multi-robot system consisting of multiple units of two variants of a miniature robot. The first variant-a wheeled ground unit-is at the core of a swarm of floor-mapping robots exhibiting scalability, robustness and flexibility. These properties are systematically tested and quantitatively evaluated in unstructured and dynamic environments, in the absence of any supporting infrastructure. The results of repeated sets of experiments show a consistent performance for all three features, as well as the possibility to inject units into the system while it is operating. Several units of the second variant-a wheg-based wall-climbing unit-are used to support the swarm of mapping robots when simultaneously exploring multiple floors by expanding the distributed communication channel necessary for the coordinated behavior among platforms. Although the occupancy-grid maps obtained can be large, they are fully distributed. Not a single robotic unit possesses the overall map, which is not required by our cooperative path-planning strategy.