 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCosmos 3: Omnimodal World Models for Physical AI
Jun 01, 2026We introduce Cosmos 3, a family of omnimodal world models designed to jointly process and generate language, image, video, audio, and action sequences within a unified mixture-of-transformers architecture. By supporting highly flexible input-output configurations, Cosmos 3 seamlessly unifies critical modalities for Physical AI -- effectively subsuming vision-language models, video generators, world simulators, and world-action models into a single framework. Our evaluation demonstrates that Cosmos 3 establishes a new state-of-the-art across a diverse suite of understanding and generation tasks, demonstrating omnimodal world models as scalable, general-purpose backbones for embodied agents. Our post-trained Cosmos 3 models were ranked as the best open-source Text-to-Image and Image-to-Video models by Artificial Analysis, and the best policy model by RoboArena at the time the technical report was written. To accelerate open research and deployment in Physical AI, we make our code, model checkpoints, curated synthetic datasets, and evaluation benchmark available under the Linux Foundation's OpenMDW-1.1 https://openmdw.ai/license/1-1/ License at https://github.com/nvidia/cosmos}{github.com/nvidia/cosmos and https://huggingface.co/collections/nvidia/cosmos3 . The project website is available at https://research.nvidia.com/labs/cosmos-lab/cosmos3 .
Sim2SG: Sim-to-Real Scene Graph Generation for Transfer Learning
Nov 30, 2020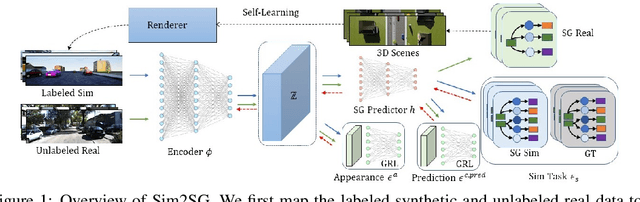

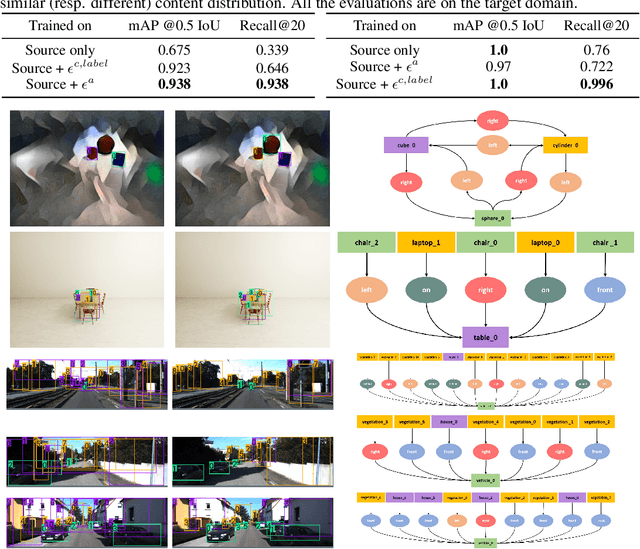
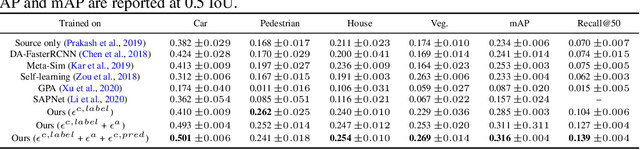
Scene graph (SG) generation has been gaining a lot of traction recently. Current SG generation techniques, however, rely on the availability of expensive and limited number of labeled datasets. Synthetic data offers a viable alternative as labels are essentially free. However, neural network models trained on synthetic data, do not perform well on real data because of the domain gap. To overcome this challenge, we propose Sim2SG, a scalable technique for sim-to-real transfer for scene graph generation. Sim2SG addresses the domain gap by decomposing it into appearance, label and prediction discrepancies between the two domains. We handle these discrepancies by introducing pseudo statistic based self-learning and adversarial techniques. Sim2SG does not require costly supervision from the real-world dataset. Our experiments demonstrate significant improvements over baselines in reducing the domain gap both qualitatively and quantitatively. We validate our approach on toy simulators, as well as realistic simulators evaluated on real-world data.
Meta-Sim: Learning to Generate Synthetic Datasets
Apr 25, 2019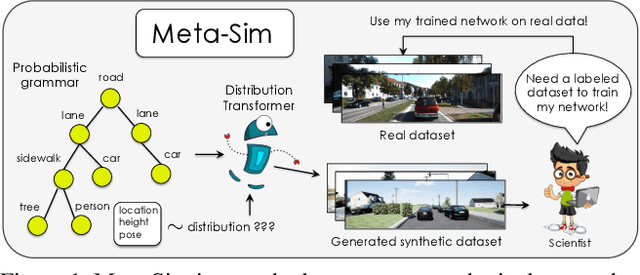
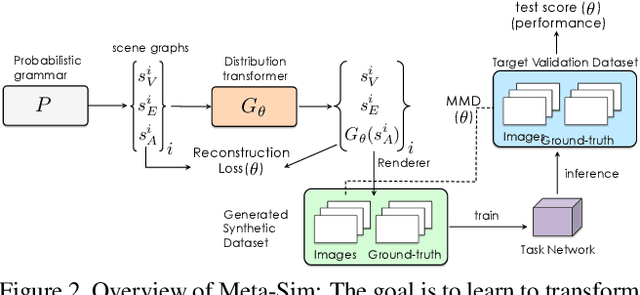
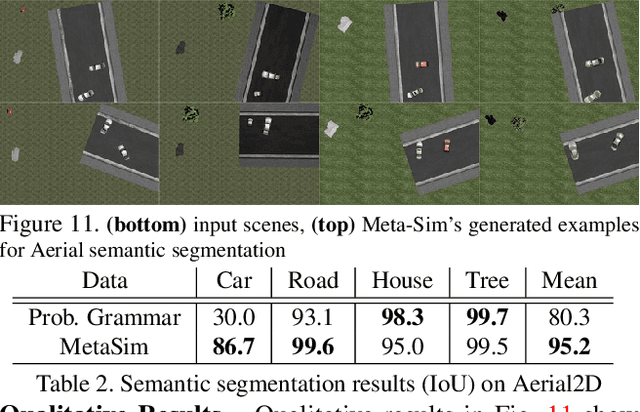
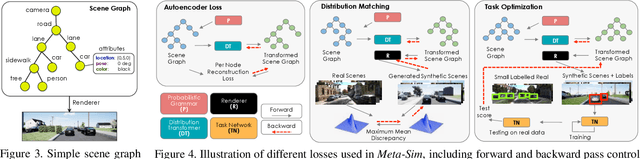
Training models to high-end performance requires availability of large labeled datasets, which are expensive to get. The goal of our work is to automatically synthesize labeled datasets that are relevant for a downstream task. We propose Meta-Sim, which learns a generative model of synthetic scenes, and obtain images as well as its corresponding ground-truth via a graphics engine. We parametrize our dataset generator with a neural network, which learns to modify attributes of scene graphs obtained from probabilistic scene grammars, so as to minimize the distribution gap between its rendered outputs and target data. If the real dataset comes with a small labeled validation set, we additionally aim to optimize a meta-objective, i.e. downstream task performance. Experiments show that the proposed method can greatly improve content generation quality over a human-engineered probabilistic scene grammar, both qualitatively and quantitatively as measured by performance on a downstream task.
Structured Domain Randomization: Bridging the Reality Gap by Context-Aware Synthetic Data
Oct 23, 2018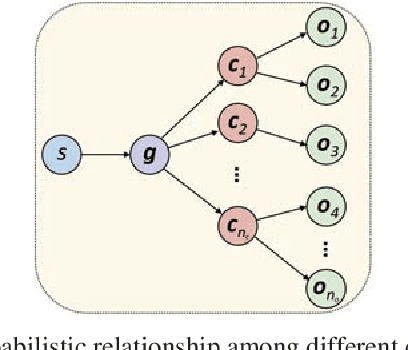
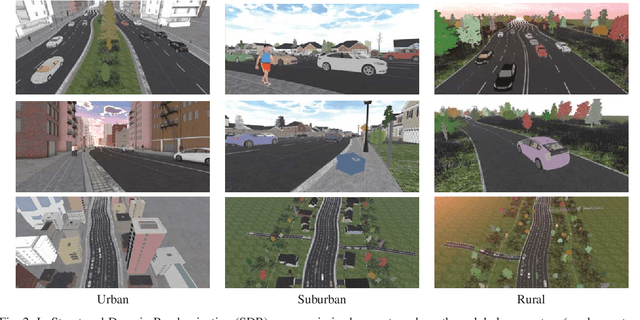
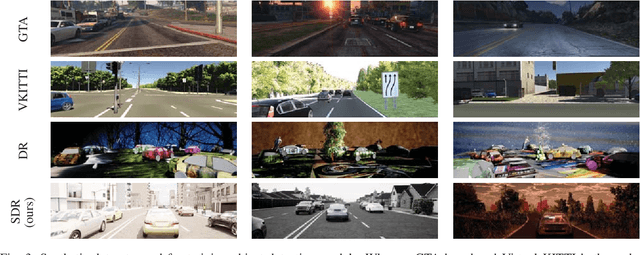

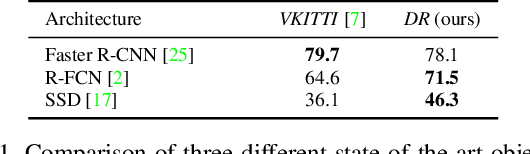
We present structured domain randomization (SDR), a variant of domain randomization (DR) that takes into account the structure and context of the scene. In contrast to DR, which places objects and distractors randomly according to a uniform probability distribution, SDR places objects and distractors randomly according to probability distributions that arise from the specific problem at hand. In this manner, SDR-generated imagery enables the neural network to take the context around an object into consideration during detection. We demonstrate the power of SDR for the problem of 2D bounding box car detection, achieving competitive results on real data after training only on synthetic data. On the KITTI easy, moderate, and hard tasks, we show that SDR outperforms other approaches to generating synthetic data (VKITTI, Sim 200k, or DR), as well as real data collected in a different domain (BDD100K). Moreover, synthetic SDR data combined with real KITTI data outperforms real KITTI data alone.
Training Deep Networks with Synthetic Data: Bridging the Reality Gap by Domain Randomization
Apr 23, 2018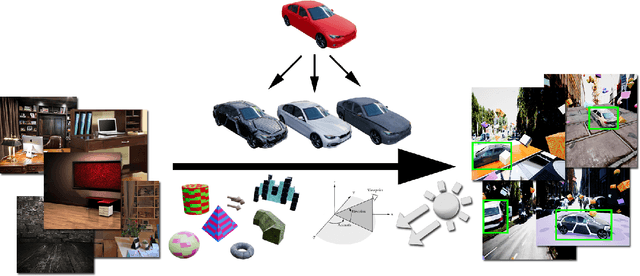
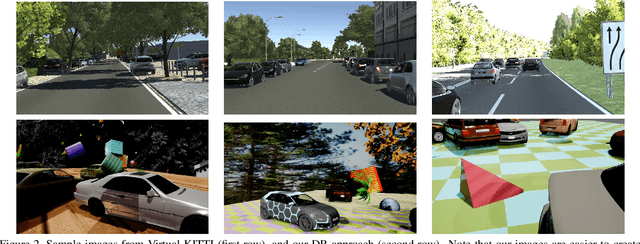
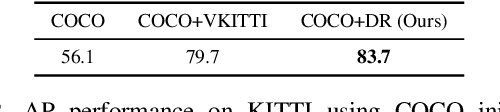
We present a system for training deep neural networks for object detection using synthetic images. To handle the variability in real-world data, the system relies upon the technique of domain randomization, in which the parameters of the simulator$-$such as lighting, pose, object textures, etc.$-$are randomized in non-realistic ways to force the neural network to learn the essential features of the object of interest. We explore the importance of these parameters, showing that it is possible to produce a network with compelling performance using only non-artistically-generated synthetic data. With additional fine-tuning on real data, the network yields better performance than using real data alone. This result opens up the possibility of using inexpensive synthetic data for training neural networks while avoiding the need to collect large amounts of hand-annotated real-world data or to generate high-fidelity synthetic worlds$-$both of which remain bottlenecks for many applications. The approach is evaluated on bounding box detection of cars on the KITTI dataset.