 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssistive Tele-op: Leveraging Transformers to Collect Robotic Task Demonstrations
Dec 09, 2021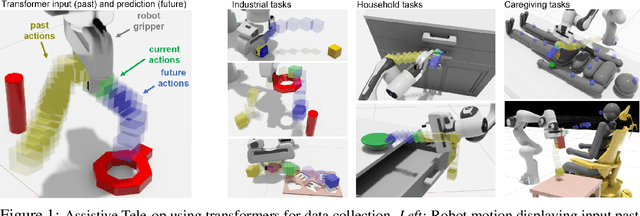
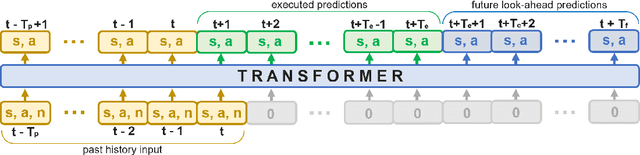
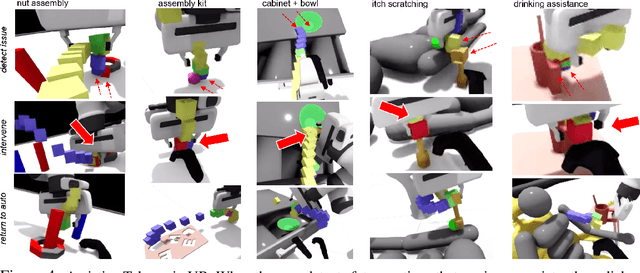
Sharing autonomy between robots and human operators could facilitate data collection of robotic task demonstrations to continuously improve learned models. Yet, the means to communicate intent and reason about the future are disparate between humans and robots. We present Assistive Tele-op, a virtual reality (VR) system for collecting robot task demonstrations that displays an autonomous trajectory forecast to communicate the robot's intent. As the robot moves, the user can switch between autonomous and manual control when desired. This allows users to collect task demonstrations with both a high success rate and with greater ease than manual teleoperation systems. Our system is powered by transformers, which can provide a window of potential states and actions far into the future -- with almost no added computation time. A key insight is that human intent can be injected at any location within the transformer sequence if the user decides that the model-predicted actions are inappropriate. At every time step, the user can (1) do nothing and allow autonomous operation to continue while observing the robot's future plan sequence, or (2) take over and momentarily prescribe a different set of actions to nudge the model back on track. We host the videos and other supplementary material at https://sites.google.com/view/assistive-teleop.
Structured Domain Randomization: Bridging the Reality Gap by Context-Aware Synthetic Data
Oct 23, 2018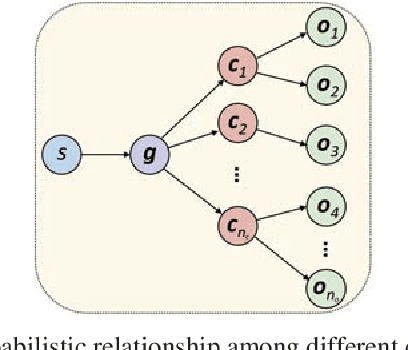
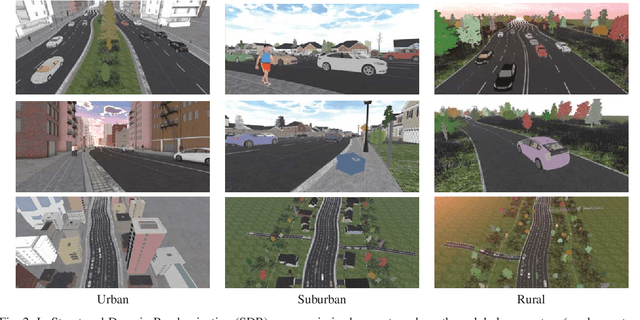
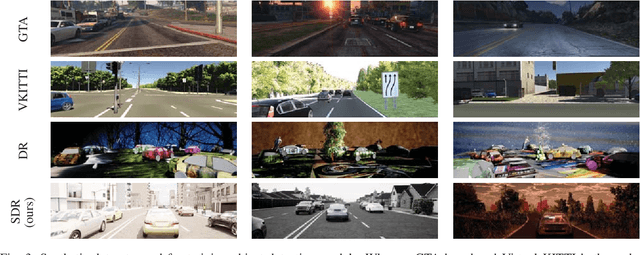

We present structured domain randomization (SDR), a variant of domain randomization (DR) that takes into account the structure and context of the scene. In contrast to DR, which places objects and distractors randomly according to a uniform probability distribution, SDR places objects and distractors randomly according to probability distributions that arise from the specific problem at hand. In this manner, SDR-generated imagery enables the neural network to take the context around an object into consideration during detection. We demonstrate the power of SDR for the problem of 2D bounding box car detection, achieving competitive results on real data after training only on synthetic data. On the KITTI easy, moderate, and hard tasks, we show that SDR outperforms other approaches to generating synthetic data (VKITTI, Sim 200k, or DR), as well as real data collected in a different domain (BDD100K). Moreover, synthetic SDR data combined with real KITTI data outperforms real KITTI data alone.