 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Graph Convolutional Network Training with GPU-Oriented Data Communication Architecture
Mar 04, 2021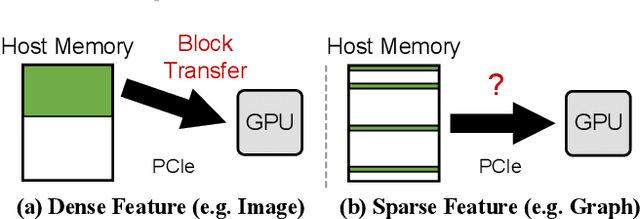
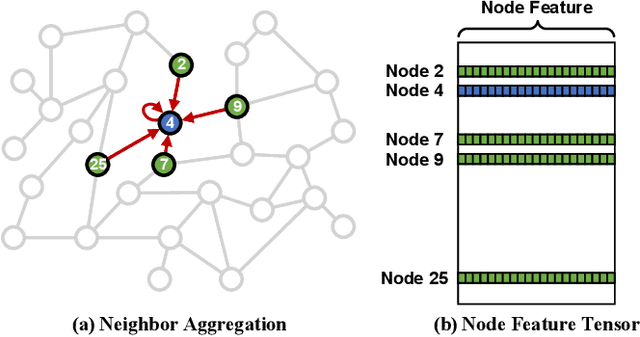
Graph Convolutional Networks (GCNs) are increasingly adopted in large-scale graph-based recommender systems. Training GCN requires the minibatch generator traversing graphs and sampling the sparsely located neighboring nodes to obtain their features. Since real-world graphs often exceed the capacity of GPU memory, current GCN training systems keep the feature table in host memory and rely on the CPU to collect sparse features before sending them to the GPUs. This approach, however, puts tremendous pressure on host memory bandwidth and the CPU. This is because the CPU needs to (1) read sparse features from memory, (2) write features into memory as a dense format, and (3) transfer the features from memory to the GPUs. In this work, we propose a novel GPU-oriented data communication approach for GCN training, where GPU threads directly access sparse features in host memory through zero-copy accesses without much CPU help. By removing the CPU gathering stage, our method significantly reduces the consumption of the host resources and data access latency. We further present two important techniques to achieve high host memory access efficiency by the GPU: (1) automatic data access address alignment to maximize PCIe packet efficiency, and (2) asynchronous zero-copy access and kernel execution to fully overlap data transfer with training. We incorporate our method into PyTorch and evaluate its effectiveness using several graphs with sizes up to 111 million nodes and 1.6 billion edges. In a multi-GPU training setup, our method is 65-92% faster than the conventional data transfer method, and can even match the performance of all-in-GPU-memory training for some graphs that fit in GPU memory.
PyTorch-Direct: Enabling GPU Centric Data Access for Very Large Graph Neural Network Training with Irregular Accesses
Jan 20, 2021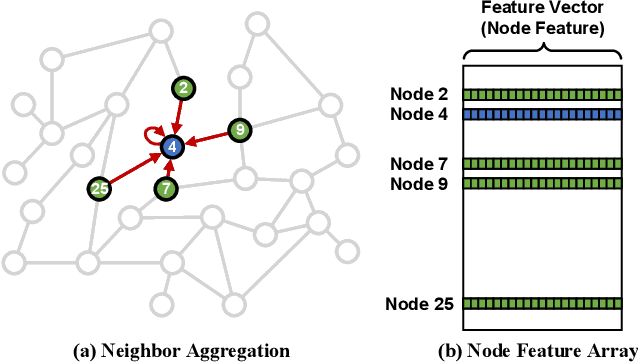

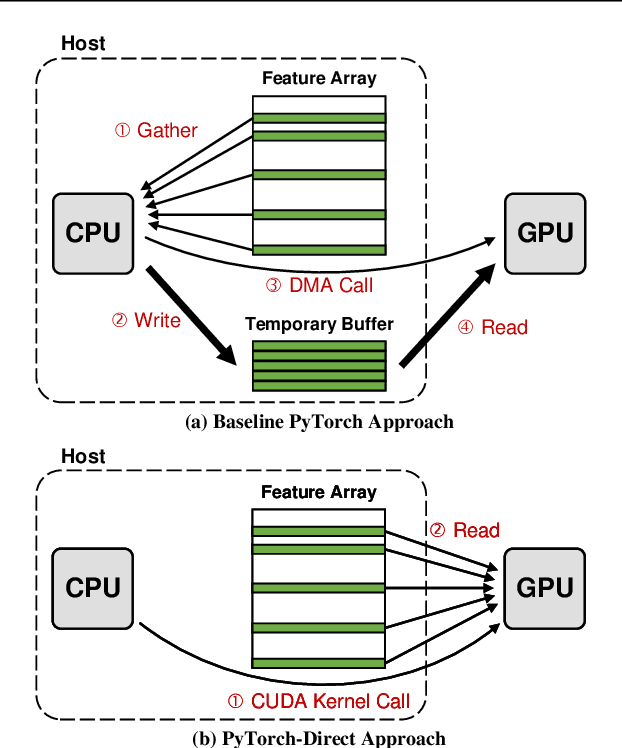

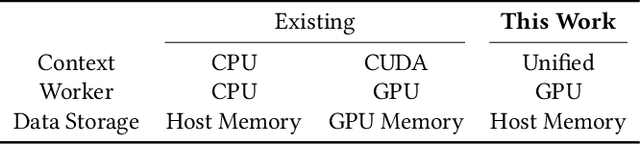
With the increasing adoption of graph neural networks (GNNs) in the machine learning community, GPUs have become an essential tool to accelerate GNN training. However, training GNNs on very large graphs that do not fit in GPU memory is still a challenging task. Unlike conventional neural networks, mini-batching input samples in GNNs requires complicated tasks such as traversing neighboring nodes and gathering their feature values. While this process accounts for a significant portion of the training time, we find existing GNN implementations using popular deep neural network (DNN) libraries such as PyTorch are limited to a CPU-centric approach for the entire data preparation step. This "all-in-CPU" approach has negative impact on the overall GNN training performance as it over-utilizes CPU resources and hinders GPU acceleration of GNN training. To overcome such limitations, we introduce PyTorch-Direct, which enables a GPU-centric data accessing paradigm for GNN training. In PyTorch-Direct, GPUs are capable of efficiently accessing complicated data structures in host memory directly without CPU intervention. Our microbenchmark and end-to-end GNN training results show that PyTorch-Direct reduces data transfer time by 47.1% on average and speeds up GNN training by up to 1.6x. Furthermore, by reducing CPU utilization, PyTorch-Direct also saves system power by 12.4% to 17.5% during training. To minimize programmer effort, we introduce a new "unified tensor" type along with necessary changes to the PyTorch memory allocator, dispatch logic, and placement rules. As a result, users need to change at most two lines of their PyTorch GNN training code for each tensor object to take advantage of PyTorch-Direct.
At-Scale Sparse Deep Neural Network Inference with Efficient GPU Implementation
Sep 02, 2020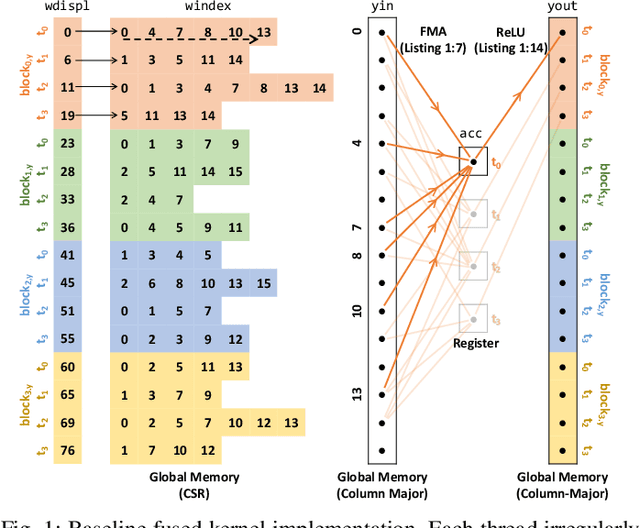
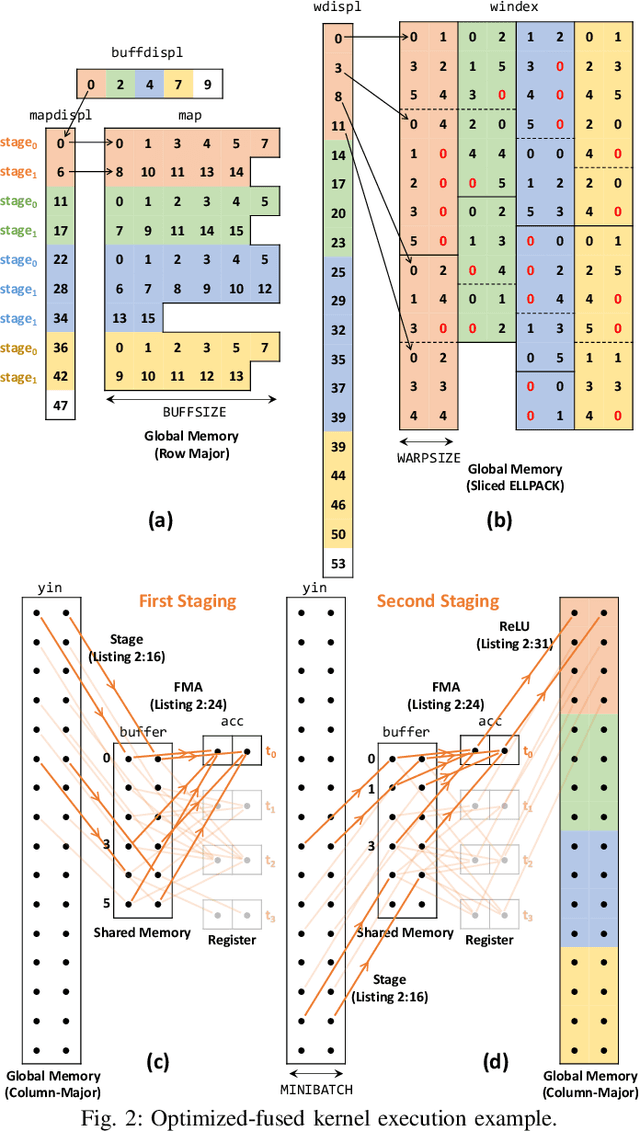
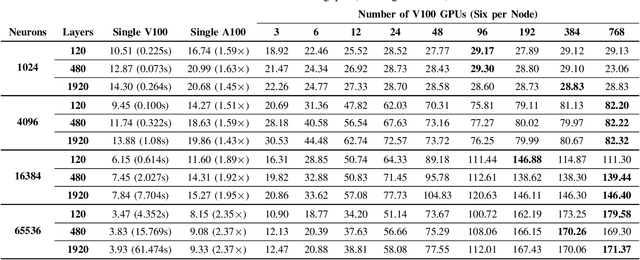
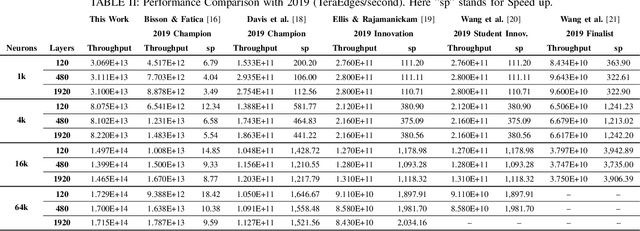
This paper presents GPU performance optimization and scaling results for inference models of the Sparse Deep Neural Network Challenge 2020. Demands for network quality have increased rapidly, pushing the size and thus the memory requirements of many neural networks beyond the capacity of available accelerators. Sparse deep neural networks (SpDNN) have shown promise for reining in the memory footprint of large neural networks. However, there is room for improvement in implementing SpDNN operations on GPUs. This work presents optimized sparse matrix multiplication kernels fused with the ReLU function. The optimized kernels reuse input feature maps from the shared memory and sparse weights from registers. For multi-GPU parallelism, our SpDNN implementation duplicates weights and statically partition the feature maps across GPUs. Results for the challenge benchmarks show that the proposed kernel design and multi-GPU parallelization achieve up to 180 tera-edges per second inference throughput. These results are up to 4.3x faster for a single GPU and an order of magnitude faster at full scale than those of the champion of the 2019 Sparse Deep Neural Network Graph Challenge for the same generation of NVIDIA V100 GPUs. Using the same implementation, we also show single-GPU throughput on NVIDIA A100 is 2.37$\times$ faster than V100.
* 7 pages
Optimizing Multi-GPU Parallelization Strategies for Deep Learning Training
Jul 30, 2019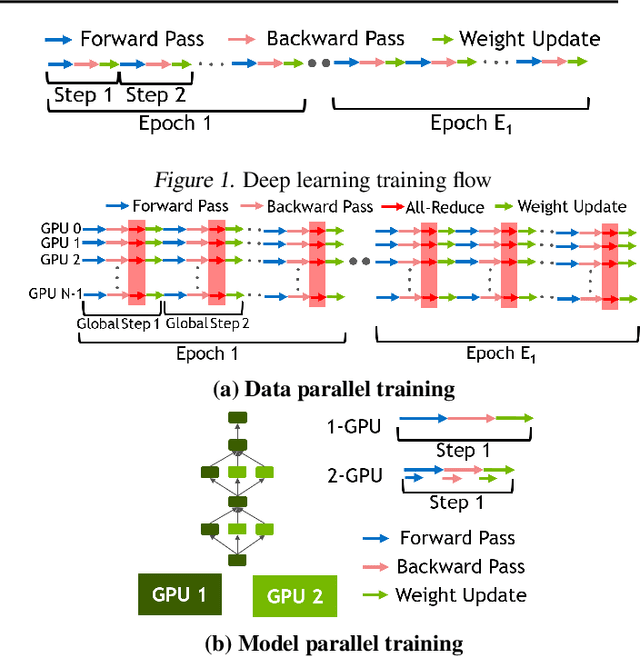
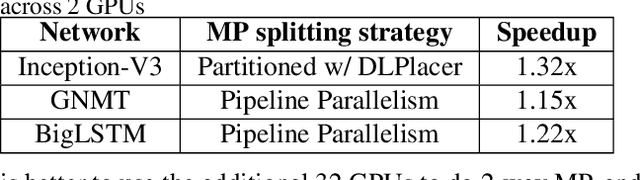
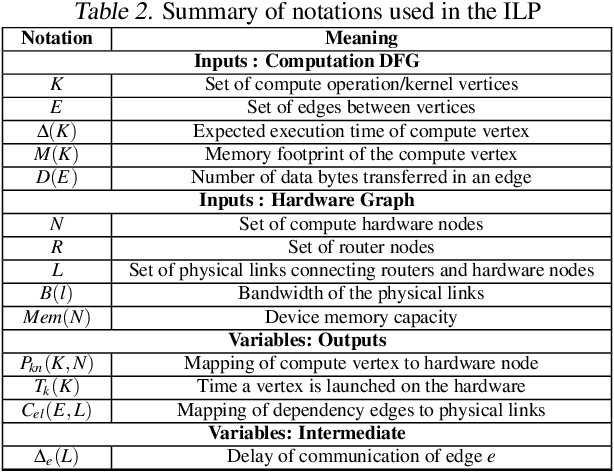
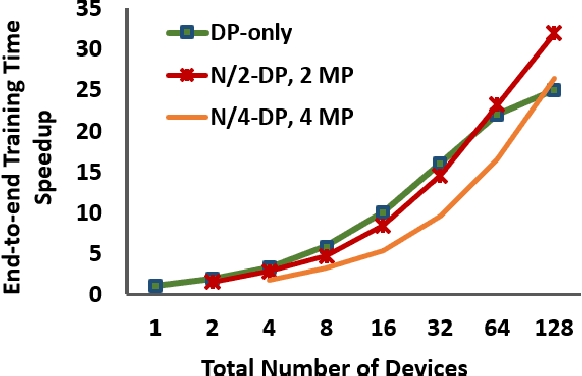
Deploying deep learning (DL) models across multiple compute devices to train large and complex models continues to grow in importance because of the demand for faster and more frequent training. Data parallelism (DP) is the most widely used parallelization strategy, but as the number of devices in data parallel training grows, so does the communication overhead between devices. Additionally, a larger aggregate batch size per step leads to statistical efficiency loss, i.e., a larger number of epochs are required to converge to a desired accuracy. These factors affect overall training time and beyond a certain number of devices, the speedup from leveraging DP begins to scale poorly. In addition to DP, each training step can be accelerated by exploiting model parallelism (MP). This work explores hybrid parallelization, where each data parallel worker is comprised of more than one device, across which the model dataflow graph (DFG) is split using MP. We show that at scale, hybrid training will be more effective at minimizing end-to-end training time than exploiting DP alone. We project that for Inception-V3, GNMT, and BigLSTM, the hybrid strategy provides an end-to-end training speedup of at least 26.5%, 8%, and 22% respectively compared to what DP alone can achieve at scale.