 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Open-Source Modular Benchmark for Diffusion-Based Motion Planning in Closed-Loop Autonomous Driving
Mar 01, 2026Diffusion-based motion planners have achieved state-of-the-art results on benchmarks such as nuPlan, yet their evaluation within closed-loop production autonomous driving stacks remains largely unexplored. Existing evaluations abstract away ROS 2 communication latency and real-time scheduling constraints, while monolithic ONNX deployment freezes all solver parameters at export time. We present an open-source modular benchmark that addresses both gaps: using ONNX GraphSurgeon, we decompose a monolithic 18,398 node diffusion planner into three independently executable modules and reimplement the DPM-Solver++ denoising loop in native C++. Integrated as a ROS 2 node within Autoware, the open-source AD stack deployed on real vehicles worldwide, the system enables runtime-configurable solver parameters without model recompilation and per-step observability of the denoising process, breaking the black box of monolithic deployment. Unlike evaluations in standalone simulators such as CARLA, our benchmark operates within a production-grade stack and is validated through AWSIM closed-loop simulation. Through systematic comparison of DPM-Solver++ (first- and second-order) and DDIM across six step-count configurations (N in {3, 5, 7, 10, 15, 20}), we show that encoder caching yields a 3.2x latency reduction, and that second-order solving reduces FDE by 41% at N=3 compared to first-order. The complete codebase will be released as open-source, providing a direct path from simulation benchmarks to real-vehicle deployment.
Trust, Don't Trust, or Flip: Robust Preference-Based Reinforcement Learning with Multi-Expert Feedback
Jan 26, 2026Preference-based reinforcement learning (PBRL) offers a promising alternative to explicit reward engineering by learning from pairwise trajectory comparisons. However, real-world preference data often comes from heterogeneous annotators with varying reliability; some accurate, some noisy, and some systematically adversarial. Existing PBRL methods either treat all feedback equally or attempt to filter out unreliable sources, but both approaches fail when faced with adversarial annotators who systematically provide incorrect preferences. We introduce TriTrust-PBRL (TTP), a unified framework that jointly learns a shared reward model and expert-specific trust parameters from multi-expert preference feedback. The key insight is that trust parameters naturally evolve during gradient-based optimization to be positive (trust), near zero (ignore), or negative (flip), enabling the model to automatically invert adversarial preferences and recover useful signal rather than merely discarding corrupted feedback. We provide theoretical analysis establishing identifiability guarantees and detailed gradient analysis that explains how expert separation emerges naturally during training without explicit supervision. Empirically, we evaluate TTP on four diverse domains spanning manipulation tasks (MetaWorld) and locomotion (DM Control) under various corruption scenarios. TTP achieves state-of-the-art robustness, maintaining near-oracle performance under adversarial corruption while standard PBRL methods fail catastrophically. Notably, TTP outperforms existing baselines by successfully learning from mixed expert pools containing both reliable and adversarial annotators, all while requiring no expert features beyond identification indices and integrating seamlessly with existing PBRL pipelines.
SUG-Occ: An Explicit Semantics and Uncertainty Guided Sparse Learning Framework for Real-Time 3D Occupancy Prediction
Jan 16, 2026As autonomous driving moves toward full scene understanding, 3D semantic occupancy prediction has emerged as a crucial perception task, offering voxel-level semantics beyond traditional detection and segmentation paradigms. However, such a refined representation for scene understanding incurs prohibitive computation and memory overhead, posing a major barrier to practical real-time deployment. To address this, we propose SUG-Occ, an explicit Semantics and Uncertainty Guided Sparse Learning Enabled 3D Occupancy Prediction Framework, which exploits the inherent sparsity of 3D scenes to reduce redundant computation while maintaining geometric and semantic completeness. Specifically, we first utilize semantic and uncertainty priors to suppress projections from free space during view transformation while employing an explicit unsigned distance encoding to enhance geometric consistency, producing a structurally consistent sparse 3D representation. Secondly, we design an cascade sparse completion module via hyper cross sparse convolution and generative upsampling to enable efficiently coarse-to-fine reasoning. Finally, we devise an object contextual representation (OCR) based mask decoder that aggregates global semantic context from sparse features and refines voxel-wise predictions via lightweight query-context interactions, avoiding expensive attention operations over volumetric features. Extensive experiments on SemanticKITTI benchmark demonstrate that the proposed approach outperforms the baselines, achieving a 7.34/% improvement in accuracy and a 57.8\% gain in efficiency.
You Share Beliefs, I Adapt: Progressive Heterogeneous Collaborative Perception
Sep 11, 2025Collaborative perception enables vehicles to overcome individual perception limitations by sharing information, allowing them to see further and through occlusions. In real-world scenarios, models on different vehicles are often heterogeneous due to manufacturer variations. Existing methods for heterogeneous collaborative perception address this challenge by fine-tuning adapters or the entire network to bridge the domain gap. However, these methods are impractical in real-world applications, as each new collaborator must undergo joint training with the ego vehicle on a dataset before inference, or the ego vehicle stores models for all potential collaborators in advance. Therefore, we pose a new question: Can we tackle this challenge directly during inference, eliminating the need for joint training? To answer this, we introduce Progressive Heterogeneous Collaborative Perception (PHCP), a novel framework that formulates the problem as few-shot unsupervised domain adaptation. Unlike previous work, PHCP dynamically aligns features by self-training an adapter during inference, eliminating the need for labeled data and joint training. Extensive experiments on the OPV2V dataset demonstrate that PHCP achieves strong performance across diverse heterogeneous scenarios. Notably, PHCP achieves performance comparable to SOTA methods trained on the entire dataset while using only a small amount of unlabeled data.
Towards Efficient Roadside LiDAR Deployment: A Fast Surrogate Metric Based on Entropy-Guided Visibility
Apr 09, 2025The deployment of roadside LiDAR sensors plays a crucial role in the development of Cooperative Intelligent Transport Systems (C-ITS). However, the high cost of LiDAR sensors necessitates efficient placement strategies to maximize detection performance. Traditional roadside LiDAR deployment methods rely on expert insight, making them time-consuming. Automating this process, however, demands extensive computation, as it requires not only visibility evaluation but also assessing detection performance across different LiDAR placements. To address this challenge, we propose a fast surrogate metric, the Entropy-Guided Visibility Score (EGVS), based on information gain to evaluate object detection performance in roadside LiDAR configurations. EGVS leverages Traffic Probabilistic Occupancy Grids (TPOG) to prioritize critical areas and employs entropy-based calculations to quantify the information captured by LiDAR beams. This eliminates the need for direct detection performance evaluation, which typically requires extensive labeling and computational resources. By integrating EGVS into the optimization process, we significantly accelerate the search for optimal LiDAR configurations. Experimental results using the AWSIM simulator demonstrate that EGVS strongly correlates with Average Precision (AP) scores and effectively predicts object detection performance. This approach offers a computationally efficient solution for roadside LiDAR deployment, facilitating scalable smart infrastructure development.
Where Do You Go? Pedestrian Trajectory Prediction using Scene Features
Jan 23, 2025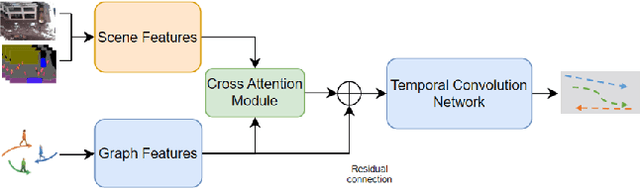
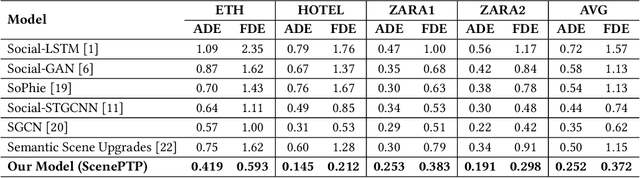
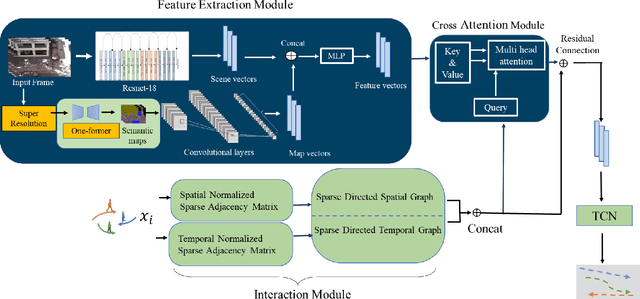

Accurate prediction of pedestrian trajectories is crucial for enhancing the safety of autonomous vehicles and reducing traffic fatalities involving pedestrians. While numerous studies have focused on modeling interactions among pedestrians to forecast their movements, the influence of environmental factors and scene-object placements has been comparatively underexplored. In this paper, we present a novel trajectory prediction model that integrates both pedestrian interactions and environmental context to improve prediction accuracy. Our approach captures spatial and temporal interactions among pedestrians within a sparse graph framework. To account for pedestrian-scene interactions, we employ advanced image enhancement and semantic segmentation techniques to extract detailed scene features. These scene and interaction features are then fused through a cross-attention mechanism, enabling the model to prioritize relevant environmental factors that influence pedestrian movements. Finally, a temporal convolutional network processes the fused features to predict future pedestrian trajectories. Experimental results demonstrate that our method significantly outperforms existing state-of-the-art approaches, achieving ADE and FDE values of 0.252 and 0.372 meters, respectively, underscoring the importance of incorporating both social interactions and environmental context in pedestrian trajectory prediction.
Neural Error Covariance Estimation for Precise LiDAR Localization
Jan 05, 2025Autonomous vehicles have gained significant attention due to technological advancements and their potential to transform transportation. A critical challenge in this domain is precise localization, particularly in LiDAR-based map matching, which is prone to errors due to degeneracy in the data. Most sensor fusion techniques, such as the Kalman filter, rely on accurate error covariance estimates for each sensor to improve localization accuracy. However, obtaining reliable covariance values for map matching remains a complex task. To address this challenge, we propose a neural network-based framework for predicting localization error covariance in LiDAR map matching. To achieve this, we introduce a novel dataset generation method specifically designed for error covariance estimation. In our evaluation using a Kalman filter, we achieved a 2 cm improvement in localization accuracy, a significant enhancement in this domain.
LiDAR-Camera Fusion for Video Panoptic Segmentation without Video Training
Dec 30, 2024



Panoptic segmentation, which combines instance and semantic segmentation, has gained a lot of attention in autonomous vehicles, due to its comprehensive representation of the scene. This task can be applied for cameras and LiDAR sensors, but there has been a limited focus on combining both sensors to enhance image panoptic segmentation (PS). Although previous research has acknowledged the benefit of 3D data on camera-based scene perception, no specific study has explored the influence of 3D data on image and video panoptic segmentation (VPS).This work seeks to introduce a feature fusion module that enhances PS and VPS by fusing LiDAR and image data for autonomous vehicles. We also illustrate that, in addition to this fusion, our proposed model, which utilizes two simple modifications, can further deliver even more high-quality VPS without being trained on video data. The results demonstrate a substantial improvement in both the image and video panoptic segmentation evaluation metrics by up to 5 points.
eRSS-RAMP: A Rule-Adherence Motion Planner Based on Extended Responsibility-Sensitive Safety for Autonomous Driving
Sep 04, 2024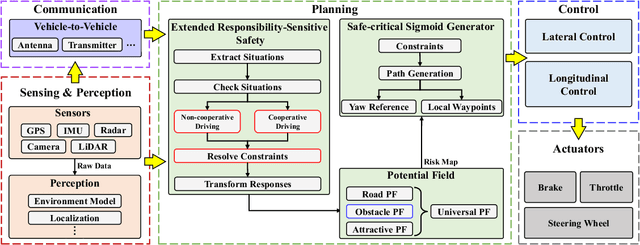
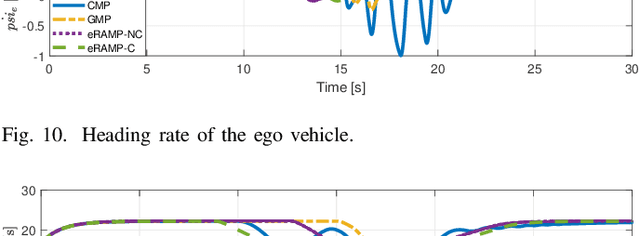
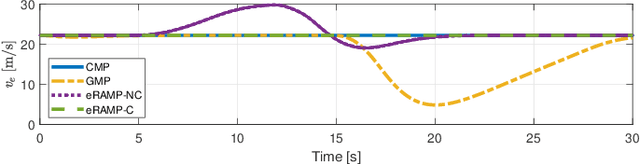
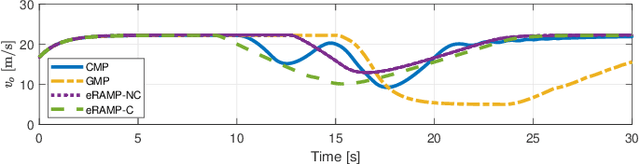
Driving safety and responsibility determination are indispensable pieces of the puzzle for autonomous driving. They are also deeply related to the allocation of right-of-way and the determination of accident liability. Therefore, Intel/Mobileye designed the responsibility-sensitive safety (RSS) framework to further enhance the safety regulation of autonomous driving, which mathematically defines rules for autonomous vehicles (AVs) behaviors in various traffic scenarios. However, the RSS framework's rules are relatively rudimentary in certain scenarios characterized by interaction uncertainty, especially those requiring collaborative driving during emergency collision avoidance. Besides, the integration of the RSS framework with motion planning is rarely discussed in current studies. Therefore, we proposed a rule-adherence motion planner (RAMP) based on the extended RSS (eRSS) regulation for non-connected and connected AVs in merging and emergency-avoiding scenarios. The simulation results indicate that the proposed method can achieve faster and safer lane merging performance (53.0% shorter merging length and a 73.5% decrease in merging time), and allows for more stable steering maneuvers in emergency collision avoidance, resulting in smoother paths for ego vehicle and surrounding vehicles.
Large Language Models for Human-like Autonomous Driving: A Survey
Jul 27, 2024



Large Language Models (LLMs), AI models trained on massive text corpora with remarkable language understanding and generation capabilities, are transforming the field of Autonomous Driving (AD). As AD systems evolve from rule-based and optimization-based methods to learning-based techniques like deep reinforcement learning, they are now poised to embrace a third and more advanced category: knowledge-based AD empowered by LLMs. This shift promises to bring AD closer to human-like AD. However, integrating LLMs into AD systems poses challenges in real-time inference, safety assurance, and deployment costs. This survey provides a comprehensive and critical review of recent progress in leveraging LLMs for AD, focusing on their applications in modular AD pipelines and end-to-end AD systems. We highlight key advancements, identify pressing challenges, and propose promising research directions to bridge the gap between LLMs and AD, thereby facilitating the development of more human-like AD systems. The survey first introduces LLMs' key features and common training schemes, then delves into their applications in modular AD pipelines and end-to-end AD, respectively, followed by discussions on open challenges and future directions. Through this in-depth analysis, we aim to provide insights and inspiration for researchers and practitioners working at the intersection of AI and autonomous vehicles, ultimately contributing to safer, smarter, and more human-centric AD technologies.