 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeeRSS-RAMP: A Rule-Adherence Motion Planner Based on Extended Responsibility-Sensitive Safety for Autonomous Driving
Sep 04, 2024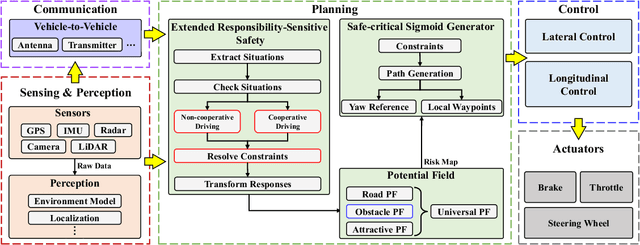
Driving safety and responsibility determination are indispensable pieces of the puzzle for autonomous driving. They are also deeply related to the allocation of right-of-way and the determination of accident liability. Therefore, Intel/Mobileye designed the responsibility-sensitive safety (RSS) framework to further enhance the safety regulation of autonomous driving, which mathematically defines rules for autonomous vehicles (AVs) behaviors in various traffic scenarios. However, the RSS framework's rules are relatively rudimentary in certain scenarios characterized by interaction uncertainty, especially those requiring collaborative driving during emergency collision avoidance. Besides, the integration of the RSS framework with motion planning is rarely discussed in current studies. Therefore, we proposed a rule-adherence motion planner (RAMP) based on the extended RSS (eRSS) regulation for non-connected and connected AVs in merging and emergency-avoiding scenarios. The simulation results indicate that the proposed method can achieve faster and safer lane merging performance (53.0% shorter merging length and a 73.5% decrease in merging time), and allows for more stable steering maneuvers in emergency collision avoidance, resulting in smoother paths for ego vehicle and surrounding vehicles.