 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSUG-Occ: An Explicit Semantics and Uncertainty Guided Sparse Learning Framework for Real-Time 3D Occupancy Prediction
Jan 16, 2026As autonomous driving moves toward full scene understanding, 3D semantic occupancy prediction has emerged as a crucial perception task, offering voxel-level semantics beyond traditional detection and segmentation paradigms. However, such a refined representation for scene understanding incurs prohibitive computation and memory overhead, posing a major barrier to practical real-time deployment. To address this, we propose SUG-Occ, an explicit Semantics and Uncertainty Guided Sparse Learning Enabled 3D Occupancy Prediction Framework, which exploits the inherent sparsity of 3D scenes to reduce redundant computation while maintaining geometric and semantic completeness. Specifically, we first utilize semantic and uncertainty priors to suppress projections from free space during view transformation while employing an explicit unsigned distance encoding to enhance geometric consistency, producing a structurally consistent sparse 3D representation. Secondly, we design an cascade sparse completion module via hyper cross sparse convolution and generative upsampling to enable efficiently coarse-to-fine reasoning. Finally, we devise an object contextual representation (OCR) based mask decoder that aggregates global semantic context from sparse features and refines voxel-wise predictions via lightweight query-context interactions, avoiding expensive attention operations over volumetric features. Extensive experiments on SemanticKITTI benchmark demonstrate that the proposed approach outperforms the baselines, achieving a 7.34/% improvement in accuracy and a 57.8\% gain in efficiency.
eRSS-RAMP: A Rule-Adherence Motion Planner Based on Extended Responsibility-Sensitive Safety for Autonomous Driving
Sep 04, 2024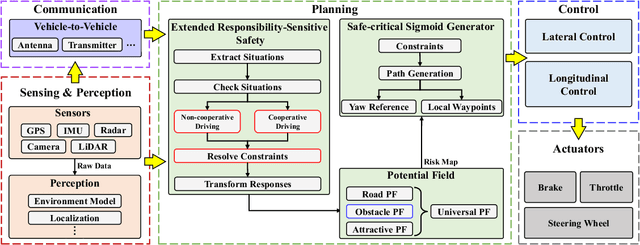
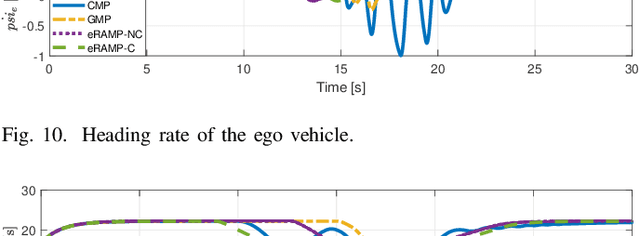
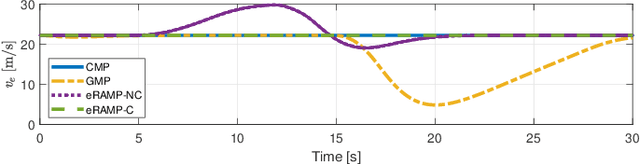
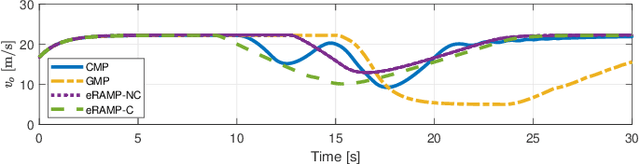
Driving safety and responsibility determination are indispensable pieces of the puzzle for autonomous driving. They are also deeply related to the allocation of right-of-way and the determination of accident liability. Therefore, Intel/Mobileye designed the responsibility-sensitive safety (RSS) framework to further enhance the safety regulation of autonomous driving, which mathematically defines rules for autonomous vehicles (AVs) behaviors in various traffic scenarios. However, the RSS framework's rules are relatively rudimentary in certain scenarios characterized by interaction uncertainty, especially those requiring collaborative driving during emergency collision avoidance. Besides, the integration of the RSS framework with motion planning is rarely discussed in current studies. Therefore, we proposed a rule-adherence motion planner (RAMP) based on the extended RSS (eRSS) regulation for non-connected and connected AVs in merging and emergency-avoiding scenarios. The simulation results indicate that the proposed method can achieve faster and safer lane merging performance (53.0% shorter merging length and a 73.5% decrease in merging time), and allows for more stable steering maneuvers in emergency collision avoidance, resulting in smoother paths for ego vehicle and surrounding vehicles.
A Rule-Compliance Path Planner for Lane-Merge Scenarios Based on Responsibility-Sensitive Safety
Mar 20, 2024Lane merging is one of the critical tasks for self-driving cars, and how to perform lane-merge maneuvers effectively and safely has become one of the important standards in measuring the capability of autonomous driving systems. However, due to the ambiguity in driving intentions and right-of-way issues, the lane merging process in autonomous driving remains deficient in terms of maintaining or ceding the right-of-way and attributing liability, which could result in protracted durations for merging and problems such as trajectory oscillation. Hence, we present a rule-compliance path planner (RCPP) for lane-merge scenarios, which initially employs the extended responsibility-sensitive safety (RSS) to elucidate the right-of-way, followed by the potential field-based sigmoid planner for path generation. In the simulation, we have validated the efficacy of the proposed algorithm. The algorithm demonstrated superior performance over previous approaches in aspects such as merging time (Saved 72.3%), path length (reduced 53.4%), and eliminating the trajectory oscillation.
Clothoid Curve-based Emergency-Stopping Path Planning with Adaptive Potential Field for Autonomous Vehicles
Aug 19, 2023The Potential Field (PF)-based path planning method is widely adopted for autonomous vehicles (AVs) due to its real-time efficiency and simplicity. PF often creates a rigid road boundary, and while this ensures that the ego vehicle consistently operates within the confines of the road, it also brings a lurking peril in emergency scenarios. If nearby vehicles suddenly switch lanes, the AV has to veer off and brake to evade a collision, leading to the "blind alley" effect. In such a situation, the vehicle can become trapped or confused by the conflicting forces from the obstacle vehicle PF and road boundary PF, often resulting in indecision or erratic behavior, even crashes. To address the above-mentioned challenges, this research introduces an Emergency-Stopping Path Planning (ESPP) that incorporates an adaptive PF (APF) and a clothoid curve for urgent evasion. First, we design an emergency triggering estimation to detect the "blind alley" problem by analyzing the PF distribution. Second, we regionalize the driving scene to search the optimal breach point on the road PF and the final stopping point for the vehicle by considering the possible motion range of the obstacle. Finally, we use the optimized clothoid curve to fit these calculated points under vehicle dynamics constraints to generate a smooth emergency avoidance path. The proposed ESPP-based APF method was evaluated by conducting the co-simulation between MATLAB/Simulink and CarSim Simulator in a freeway scene. The simulation results reveal that the proposed method shows increased performance in emergency collision avoidance and renders the vehicle safer, in which the duration of wheel slip is 61.9% shorter, and the maximum steering angle amplitude is 76.9% lower than other potential field-based methods.
Potential Field-based Path Planning with Interactive Speed Optimization for Autonomous Vehicles
Jun 12, 2023Path planning is critical for autonomous vehicles (AVs) to determine the optimal route while considering constraints and objectives. The potential field (PF) approach has become prevalent in path planning due to its simple structure and computational efficiency. However, current PF methods used in AVs focus solely on the path generation of the ego vehicle while assuming that the surrounding obstacle vehicles drive at a preset behavior without the PF-based path planner, which ignores the fact that the ego vehicle's PF could also impact the path generation of the obstacle vehicles. To tackle this problem, we propose a PF-based path planning approach where local paths are shared among ego and obstacle vehicles via vehicle-to-vehicle (V2V) communication. Then by integrating this shared local path into an objective function, a new optimization function called interactive speed optimization (ISO) is designed to allow driving safety and comfort for both ego and obstacle vehicles. The proposed method is evaluated using MATLAB/Simulink in the urgent merging scenarios by comparing it with conventional methods. The simulation results indicate that the proposed method can mitigate the impact of other AVs' PFs by slowing down in advance, effectively reducing the oscillations for both ego and obstacle AVs.
Occlusion-Aware Path Planning for Collision Avoidance: Leveraging Potential Field Method with Responsibility-Sensitive Safety
Jun 12, 2023Collision avoidance (CA) has always been the foremost task for autonomous vehicles (AVs) under safety criteria. And path planning is directly responsible for generating a safe path to accomplish CA while satisfying other commands. Due to the real-time computation and simple structure, the potential field (PF) has emerged as one of the mainstream path-planning algorithms. However, the current PF is primarily simulated in ideal CA scenarios, assuming complete obstacle information while disregarding occlusion issues where obstacles can be partially or entirely hidden from the AV's sensors. During the occlusion period, the occluded obstacles do not possess a PF. Once the occlusion is over, these obstacles can generate an instantaneous virtual force that impacts the ego vehicle. Therefore, we propose an occlusion-aware path planning (OAPP) with the responsibility-sensitive safety (RSS)-based PF to tackle the occlusion problem for non-connected AVs. We first categorize the detected and occluded obstacles, and then we proceed to the RSS violation check. Finally, we can generate different virtual forces from the PF for occluded and non-occluded obstacles. We compare the proposed OAPP method with other PF-based path planning methods via MATLAB/Simulink. The simulation results indicate that the proposed method can eliminate instantaneous lateral oscillation or sway and produce a smoother path than conventional PF methods.
Time-to-Collision-Aware Lane-Change Strategy Based on Potential Field and Cubic Polynomial for Autonomous Vehicles
Jun 12, 2023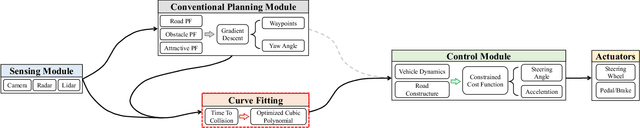
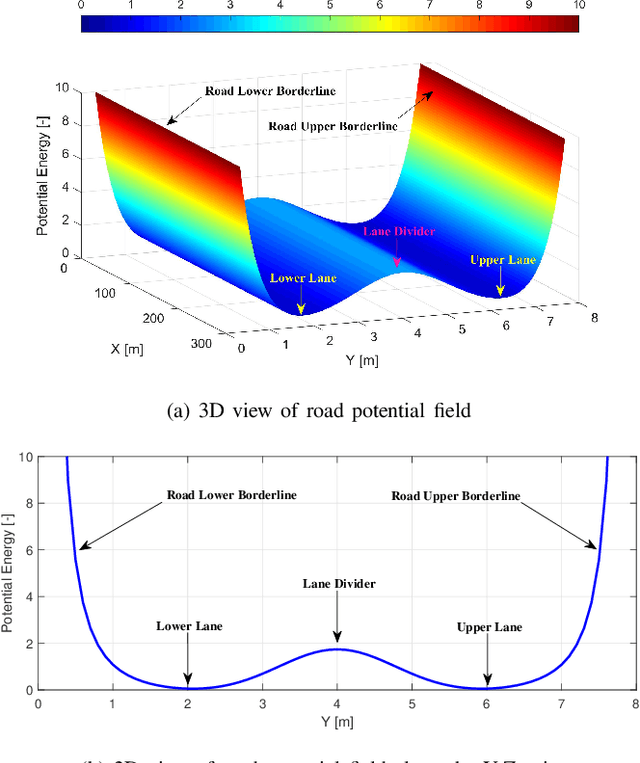
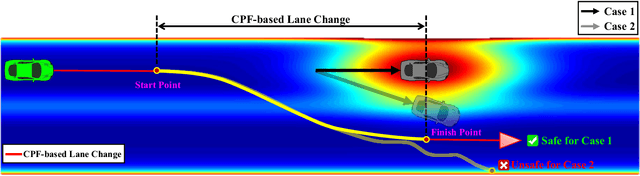
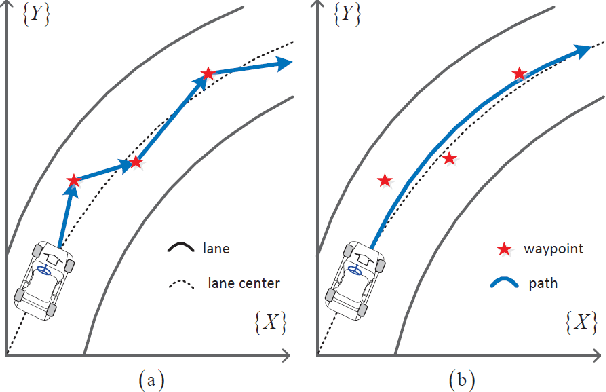
Making safe and successful lane changes (LCs) is one of the many vitally important functions of autonomous vehicles (AVs) that are needed to ensure safe driving on expressways. Recently, the simplicity and real-time performance of the potential field (PF) method have been leveraged to design decision and planning modules for AVs. However, the LC trajectory planned by the PF method is usually lengthy and takes the ego vehicle laterally parallel and close to the obstacle vehicle, which creates a dangerous situation if the obstacle vehicle suddenly steers. To mitigate this risk, we propose a time-to-collision-aware LC (TTCA-LC) strategy based on the PF and cubic polynomial in which the TTC constraint is imposed in the optimized curve fitting. The proposed approach is evaluated using MATLAB/Simulink under high-speed conditions in a comparative driving scenario. The simulation results indicate that the TTCA-LC method performs better than the conventional PF-based LC (CPF-LC) method in generating shorter, safer, and smoother trajectories. The length of the LC trajectory is shortened by over 27.1\%, and the curvature is reduced by approximately 56.1\% compared with the CPF-LC method.