 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Efficient Roadside LiDAR Deployment: A Fast Surrogate Metric Based on Entropy-Guided Visibility
Apr 09, 2025The deployment of roadside LiDAR sensors plays a crucial role in the development of Cooperative Intelligent Transport Systems (C-ITS). However, the high cost of LiDAR sensors necessitates efficient placement strategies to maximize detection performance. Traditional roadside LiDAR deployment methods rely on expert insight, making them time-consuming. Automating this process, however, demands extensive computation, as it requires not only visibility evaluation but also assessing detection performance across different LiDAR placements. To address this challenge, we propose a fast surrogate metric, the Entropy-Guided Visibility Score (EGVS), based on information gain to evaluate object detection performance in roadside LiDAR configurations. EGVS leverages Traffic Probabilistic Occupancy Grids (TPOG) to prioritize critical areas and employs entropy-based calculations to quantify the information captured by LiDAR beams. This eliminates the need for direct detection performance evaluation, which typically requires extensive labeling and computational resources. By integrating EGVS into the optimization process, we significantly accelerate the search for optimal LiDAR configurations. Experimental results using the AWSIM simulator demonstrate that EGVS strongly correlates with Average Precision (AP) scores and effectively predicts object detection performance. This approach offers a computationally efficient solution for roadside LiDAR deployment, facilitating scalable smart infrastructure development.
Just-In-Time Software Defect Prediction via Bi-modal Change Representation Learning
Oct 15, 2024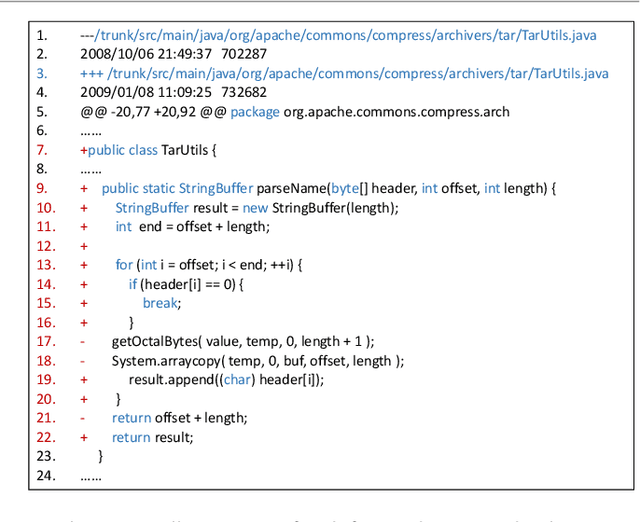
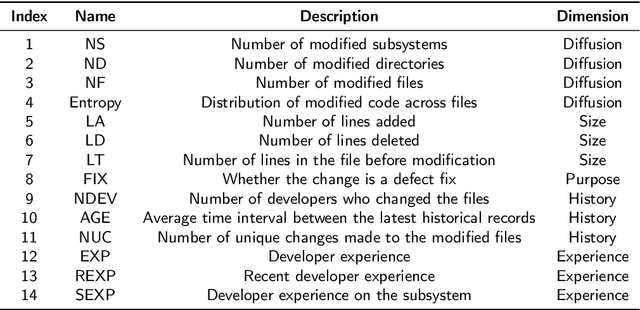
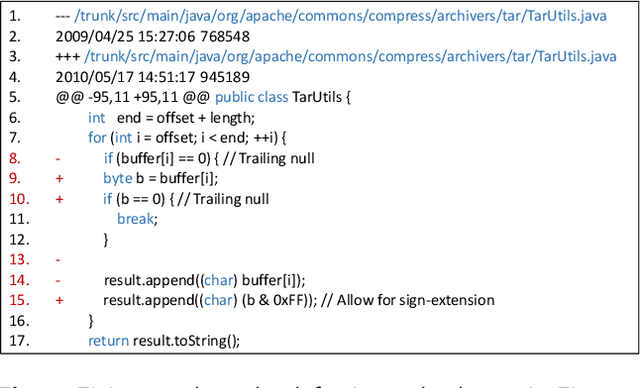

For predicting software defects at an early stage, researchers have proposed just-in-time defect prediction (JIT-DP) to identify potential defects in code commits. The prevailing approaches train models to represent code changes in history commits and utilize the learned representations to predict the presence of defects in the latest commit. However, existing models merely learn editions in source code, without considering the natural language intentions behind the changes. This limitation hinders their ability to capture deeper semantics. To address this, we introduce a novel bi-modal change pre-training model called BiCC-BERT. BiCC-BERT is pre-trained on a code change corpus to learn bi-modal semantic representations. To incorporate commit messages from the corpus, we design a novel pre-training objective called Replaced Message Identification (RMI), which learns the semantic association between commit messages and code changes. Subsequently, we integrate BiCC-BERT into JIT-DP and propose a new defect prediction approach -- JIT-BiCC. By leveraging the bi-modal representations from BiCC-BERT, JIT-BiCC captures more profound change semantics. We train JIT-BiCC using 27,391 code changes and compare its performance with 8 state-of-the-art JIT-DP approaches. The results demonstrate that JIT-BiCC outperforms all baselines, achieving a 10.8% improvement in F1-score. This highlights its effectiveness in learning the bi-modal semantics for JIT-DP.
eRSS-RAMP: A Rule-Adherence Motion Planner Based on Extended Responsibility-Sensitive Safety for Autonomous Driving
Sep 04, 2024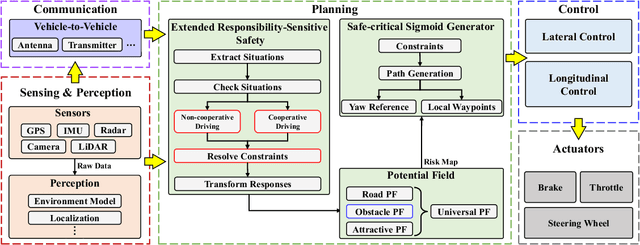
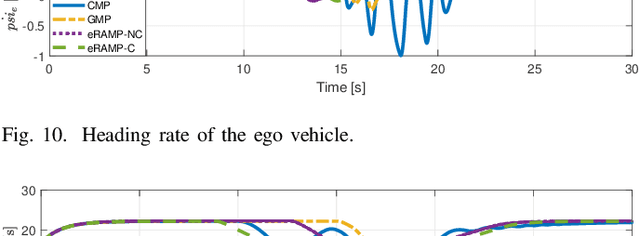
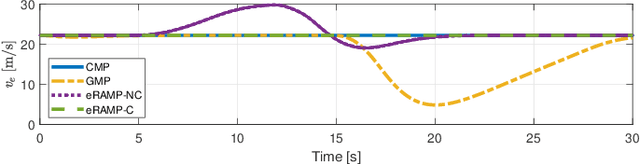
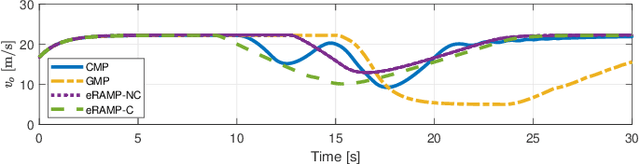
Driving safety and responsibility determination are indispensable pieces of the puzzle for autonomous driving. They are also deeply related to the allocation of right-of-way and the determination of accident liability. Therefore, Intel/Mobileye designed the responsibility-sensitive safety (RSS) framework to further enhance the safety regulation of autonomous driving, which mathematically defines rules for autonomous vehicles (AVs) behaviors in various traffic scenarios. However, the RSS framework's rules are relatively rudimentary in certain scenarios characterized by interaction uncertainty, especially those requiring collaborative driving during emergency collision avoidance. Besides, the integration of the RSS framework with motion planning is rarely discussed in current studies. Therefore, we proposed a rule-adherence motion planner (RAMP) based on the extended RSS (eRSS) regulation for non-connected and connected AVs in merging and emergency-avoiding scenarios. The simulation results indicate that the proposed method can achieve faster and safer lane merging performance (53.0% shorter merging length and a 73.5% decrease in merging time), and allows for more stable steering maneuvers in emergency collision avoidance, resulting in smoother paths for ego vehicle and surrounding vehicles.
Accurate Cooperative Localization Utilizing LiDAR-equipped Roadside Infrastructure for Autonomous Driving
Jul 11, 2024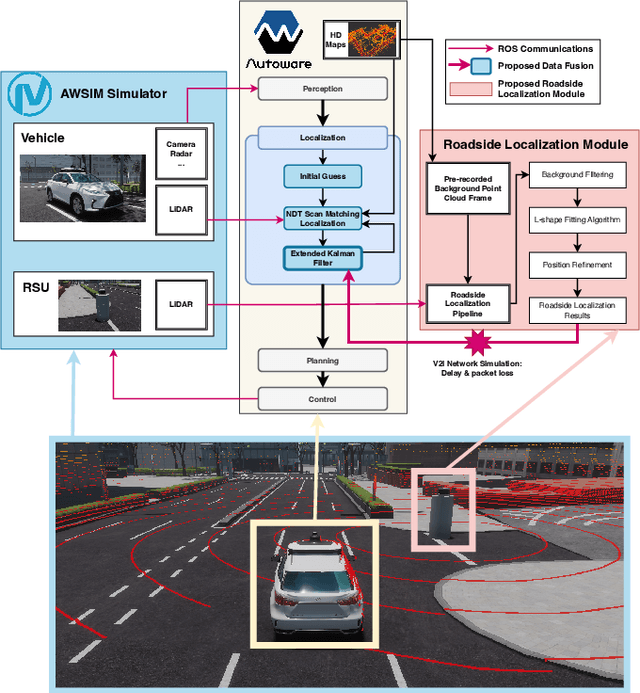
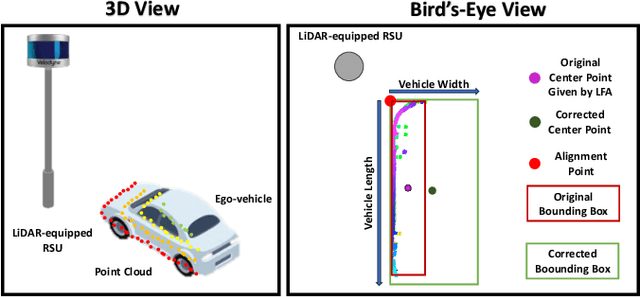
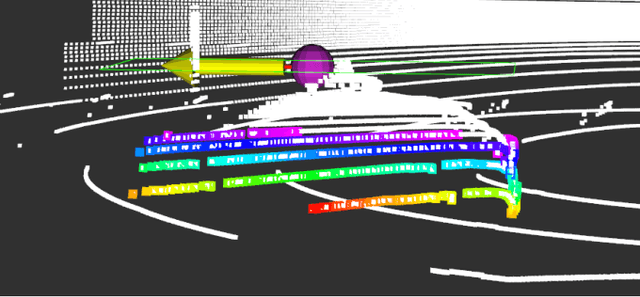
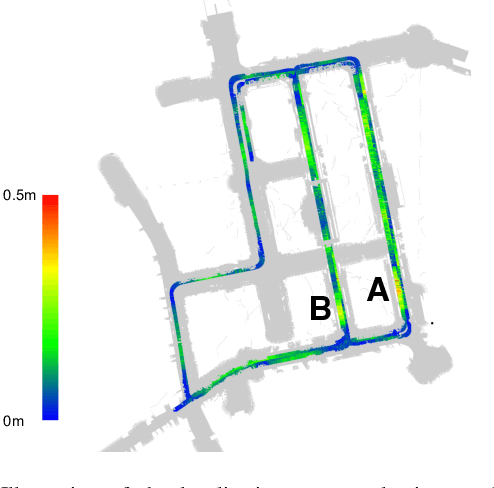
Recent advancements in LiDAR technology have significantly lowered costs and improved both its precision and resolution, thereby solidifying its role as a critical component in autonomous vehicle localization. Using sophisticated 3D registration algorithms, LiDAR now facilitates vehicle localization with centimeter-level accuracy. However, these high-precision techniques often face reliability challenges in environments devoid of identifiable map features. To address this limitation, we propose a novel approach that utilizes road side units (RSU) with vehicle-to-infrastructure (V2I) communications to assist vehicle self-localization. By using RSUs as stationary reference points and processing real-time LiDAR data, our method enhances localization accuracy through a cooperative localization framework. By placing RSUs in critical areas, our proposed method can improve the reliability and precision of vehicle localization when the traditional vehicle self-localization technique falls short. Evaluation results in an end-to-end autonomous driving simulator AWSIM show that the proposed method can improve localization accuracy by up to 80% under vulnerable environments compared to traditional localization methods. Additionally, our method also demonstrates robust resistance to network delays and packet loss in heterogeneous network environments.
A Rule-Compliance Path Planner for Lane-Merge Scenarios Based on Responsibility-Sensitive Safety
Mar 20, 2024Lane merging is one of the critical tasks for self-driving cars, and how to perform lane-merge maneuvers effectively and safely has become one of the important standards in measuring the capability of autonomous driving systems. However, due to the ambiguity in driving intentions and right-of-way issues, the lane merging process in autonomous driving remains deficient in terms of maintaining or ceding the right-of-way and attributing liability, which could result in protracted durations for merging and problems such as trajectory oscillation. Hence, we present a rule-compliance path planner (RCPP) for lane-merge scenarios, which initially employs the extended responsibility-sensitive safety (RSS) to elucidate the right-of-way, followed by the potential field-based sigmoid planner for path generation. In the simulation, we have validated the efficacy of the proposed algorithm. The algorithm demonstrated superior performance over previous approaches in aspects such as merging time (Saved 72.3%), path length (reduced 53.4%), and eliminating the trajectory oscillation.
Roadside LiDAR Assisted Cooperative Localization for Connected Autonomous Vehicles
Nov 14, 2023Advancements in LiDAR technology have led to more cost-effective production while simultaneously improving precision and resolution. As a result, LiDAR has become integral to vehicle localization, achieving centimeter-level accuracy through techniques like Normal Distributions Transform (NDT) and other advanced 3D registration algorithms. Nonetheless, these approaches are reliant on high-definition 3D point cloud maps, the creation of which involves significant expenditure. When such maps are unavailable or lack sufficient features for 3D registration algorithms, localization accuracy diminishes, posing a risk to road safety. To address this, we proposed to use LiDAR-equipped roadside unit and Vehicle-to-Infrastructure (V2I) communication to accurately estimate the connected autonomous vehicle's position and help the vehicle when its self-localization is not accurate enough. Our simulation results indicate that this method outperforms traditional NDT scan matching-based approaches in terms of localization accuracy.