 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Efficient Roadside LiDAR Deployment: A Fast Surrogate Metric Based on Entropy-Guided Visibility
Apr 09, 2025The deployment of roadside LiDAR sensors plays a crucial role in the development of Cooperative Intelligent Transport Systems (C-ITS). However, the high cost of LiDAR sensors necessitates efficient placement strategies to maximize detection performance. Traditional roadside LiDAR deployment methods rely on expert insight, making them time-consuming. Automating this process, however, demands extensive computation, as it requires not only visibility evaluation but also assessing detection performance across different LiDAR placements. To address this challenge, we propose a fast surrogate metric, the Entropy-Guided Visibility Score (EGVS), based on information gain to evaluate object detection performance in roadside LiDAR configurations. EGVS leverages Traffic Probabilistic Occupancy Grids (TPOG) to prioritize critical areas and employs entropy-based calculations to quantify the information captured by LiDAR beams. This eliminates the need for direct detection performance evaluation, which typically requires extensive labeling and computational resources. By integrating EGVS into the optimization process, we significantly accelerate the search for optimal LiDAR configurations. Experimental results using the AWSIM simulator demonstrate that EGVS strongly correlates with Average Precision (AP) scores and effectively predicts object detection performance. This approach offers a computationally efficient solution for roadside LiDAR deployment, facilitating scalable smart infrastructure development.
Detection of Global Anomalies on Distributed IoT Edges with Device-to-Device Communication
Jul 16, 2024



Anomaly detection is an important function in IoT applications for finding outliers caused by abnormal events. Anomaly detection sometimes comes with high-frequency data sampling which should be carried out at Edge devices rather than Cloud. In this paper, we consider the case that multiple IoT devices are installed in a single remote site and that they collaboratively detect anomalies from the observations with device-to-device communications. For this, we propose a fully distributed collaborative scheme for training distributed anomaly detectors with Wireless Ad Hoc Federated Learning, namely "WAFL-Autoencoder". We introduce the concept of Global Anomaly which sample is not only rare to the local device but rare to all the devices in the target domain. We also propose a distributed threshold-finding algorithm for Global Anomaly detection. With our standard benchmark-based evaluation, we have confirmed that our scheme trained anomaly detectors perfectly across the devices. We have also confirmed that the devices collaboratively found thresholds for Global Anomaly detection with low false positive rates while achieving high true positive rates with few exceptions.
Accurate Cooperative Localization Utilizing LiDAR-equipped Roadside Infrastructure for Autonomous Driving
Jul 11, 2024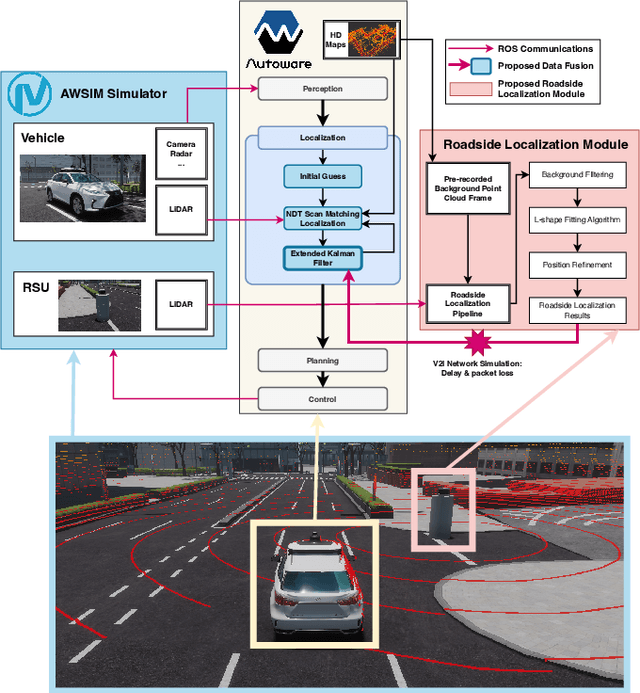
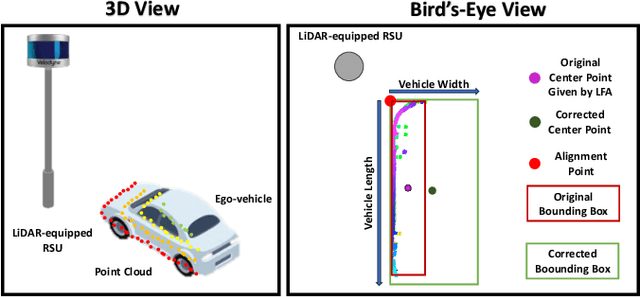
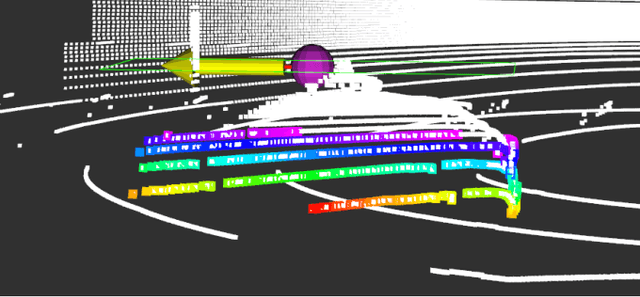
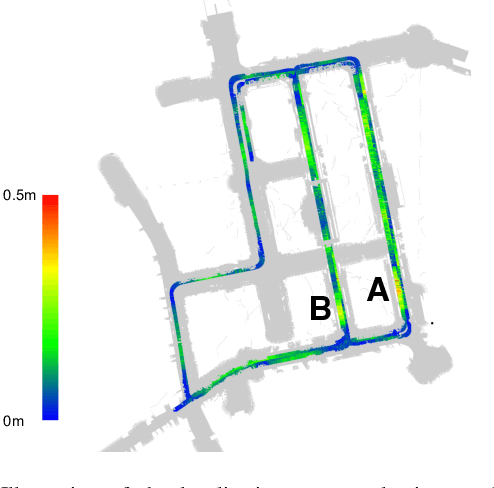
Recent advancements in LiDAR technology have significantly lowered costs and improved both its precision and resolution, thereby solidifying its role as a critical component in autonomous vehicle localization. Using sophisticated 3D registration algorithms, LiDAR now facilitates vehicle localization with centimeter-level accuracy. However, these high-precision techniques often face reliability challenges in environments devoid of identifiable map features. To address this limitation, we propose a novel approach that utilizes road side units (RSU) with vehicle-to-infrastructure (V2I) communications to assist vehicle self-localization. By using RSUs as stationary reference points and processing real-time LiDAR data, our method enhances localization accuracy through a cooperative localization framework. By placing RSUs in critical areas, our proposed method can improve the reliability and precision of vehicle localization when the traditional vehicle self-localization technique falls short. Evaluation results in an end-to-end autonomous driving simulator AWSIM show that the proposed method can improve localization accuracy by up to 80% under vulnerable environments compared to traditional localization methods. Additionally, our method also demonstrates robust resistance to network delays and packet loss in heterogeneous network environments.
Roadside LiDAR Assisted Cooperative Localization for Connected Autonomous Vehicles
Nov 14, 2023Advancements in LiDAR technology have led to more cost-effective production while simultaneously improving precision and resolution. As a result, LiDAR has become integral to vehicle localization, achieving centimeter-level accuracy through techniques like Normal Distributions Transform (NDT) and other advanced 3D registration algorithms. Nonetheless, these approaches are reliant on high-definition 3D point cloud maps, the creation of which involves significant expenditure. When such maps are unavailable or lack sufficient features for 3D registration algorithms, localization accuracy diminishes, posing a risk to road safety. To address this, we proposed to use LiDAR-equipped roadside unit and Vehicle-to-Infrastructure (V2I) communication to accurately estimate the connected autonomous vehicle's position and help the vehicle when its self-localization is not accurate enough. Our simulation results indicate that this method outperforms traditional NDT scan matching-based approaches in terms of localization accuracy.
Resilience of Wireless Ad Hoc Federated Learning against Model Poisoning Attacks
Nov 07, 2022



Wireless ad hoc federated learning (WAFL) is a fully decentralized collaborative machine learning framework organized by opportunistically encountered mobile nodes. Compared to conventional federated learning, WAFL performs model training by weakly synchronizing the model parameters with others, and this shows great resilience to a poisoned model injected by an attacker. In this paper, we provide our theoretical analysis of the WAFL's resilience against model poisoning attacks, by formulating the force balance between the poisoned model and the legitimate model. According to our experiments, we confirmed that the nodes directly encountered the attacker has been somehow compromised to the poisoned model but other nodes have shown great resilience. More importantly, after the attacker has left the network, all the nodes have finally found stronger model parameters combined with the poisoned model. Most of the attack-experienced cases achieved higher accuracy than the no-attack-experienced cases.
Wireless Ad Hoc Federated Learning: A Fully Distributed Cooperative Machine Learning
May 24, 2022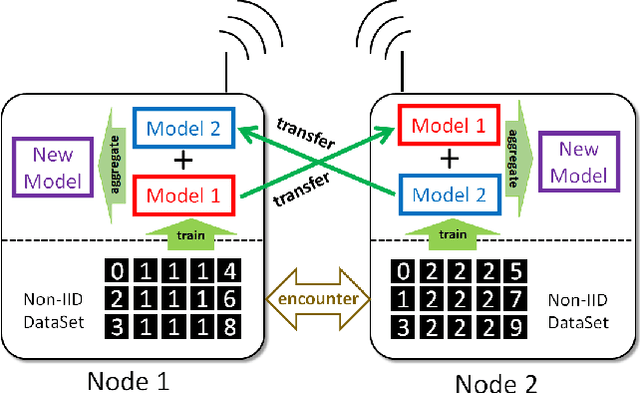
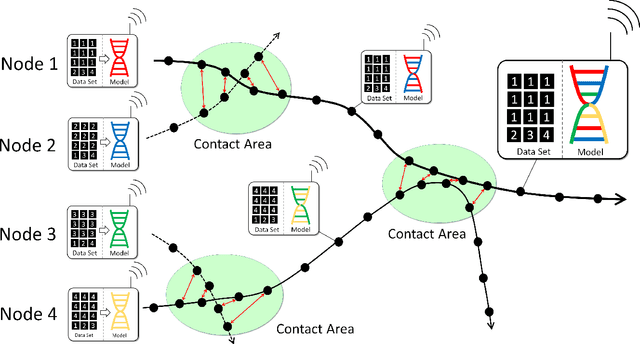
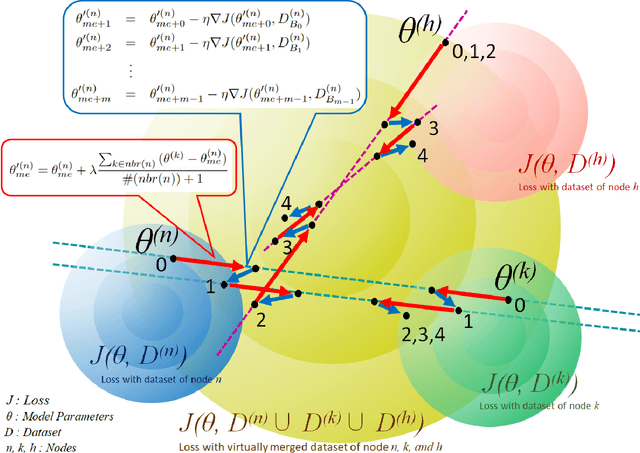
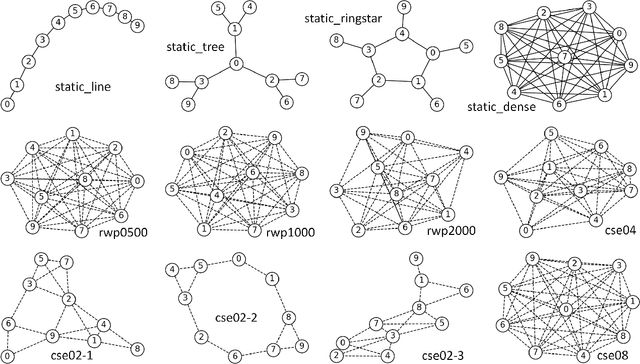
Federated learning has allowed training of a global model by aggregating local models trained on local nodes. However, it still takes client-server model, which can be further distributed, fully decentralized, or even partially connected, or totally opportunistic. In this paper, we propose a wireless ad hoc federated learning (WAFL) -- a fully distributed cooperative machine learning organized by the nodes physically nearby. Here, each node has a wireless interface and can communicate with each other when they are within the radio range. The nodes are expected to move with people, vehicles, or robots, producing opportunistic contacts with each other. In WAFL, each node trains a model individually with the local data it has. When a node encounter with others, they exchange their trained models, and generate new aggregated models, which are expected to be more general compared to the locally trained models on Non-IID data. For evaluation, we have prepared four static communication networks and two types of dynamic and opportunistic communication networks based on random waypoint mobility and community-structured environment, and then studied the training process of a fully connected neural network with 90% Non-IID MNIST dataset. The evaluation results indicate that WAFL allowed the convergence of model parameters among the nodes toward generalization, even with opportunistic node contact scenarios -- whereas in self-training (or lonely training) case, they have diverged. This WAFL's model generalization contributed to achieving higher accuracy 94.7-96.2% to the testing IID dataset compared to the self-training case 84.7%.
Reinforcement Learning Based Optimal Camera Placement for Depth Observation of Indoor Scenes
Oct 21, 2021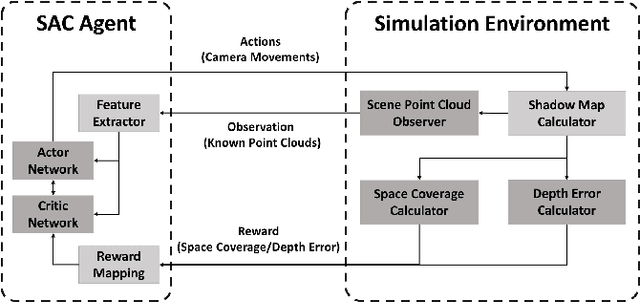
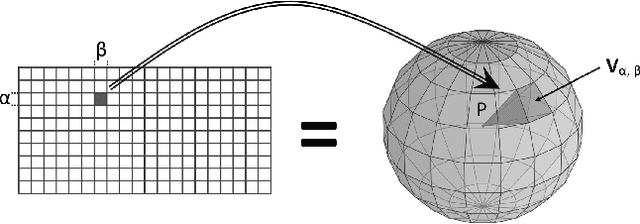
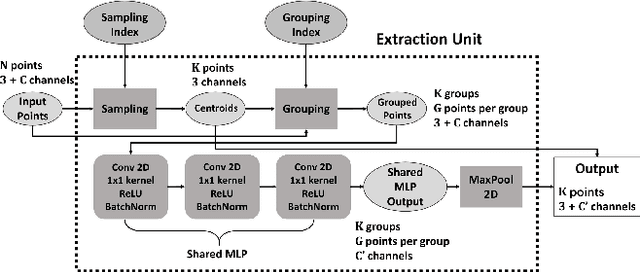
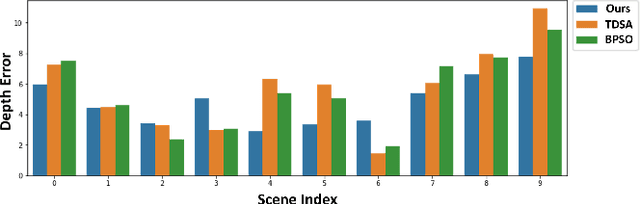
Exploring the most task-friendly camera setting -- optimal camera placement (OCP) problem -- in tasks that use multiple cameras is of great importance. However, few existing OCP solutions specialize in depth observation of indoor scenes, and most versatile solutions work offline. To this problem, an OCP online solution to depth observation of indoor scenes based on reinforcement learning is proposed in this paper. The proposed solution comprises a simulation environment that implements scene observation and reward estimation using shadow maps and an agent network containing a soft actor-critic (SAC)-based reinforcement learning backbone and a feature extractor to extract features from the observed point cloud layer-by-layer. Comparative experiments with two state-of-the-art optimization-based offline methods are conducted. The experimental results indicate that the proposed system outperforms seven out of ten test scenes in obtaining lower depth observation error. The total error in all test scenes is also less than 90% of the baseline ones. Therefore, the proposed system is more competent for depth camera placement in scenarios where there is no prior knowledge of the scenes or where a lower depth observation error is the main objective.
Decentralized Deep Learning for Mobile Edge Computing: A Survey on Communication Efficiency and Trustworthiness
Jul 30, 2021
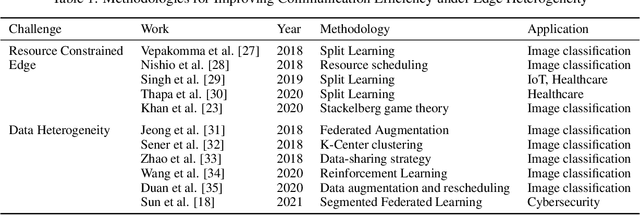

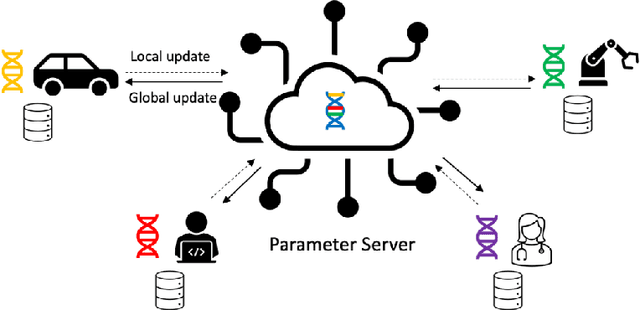
A wider coverage and a better solution to latency reduction in 5G necessitates its combination with mobile edge computing (MEC) technology. Decentralized deep learning (DDL) as a promising solution to privacy-preserving data processing for millions of edge smart devices, it leverages federated learning within the networking of local models, without disclosing a client's raw data. Especially, in industries such as finance and healthcare where sensitive data of transactions and personal medical records is cautiously maintained, DDL facilitates the collaboration among these institutes to improve the performance of local models, while protecting data privacy of participating clients. In this survey paper, we demonstrate technical fundamentals of DDL for benefiting many walks of society through decentralized learning. Furthermore, we offer a comprehensive overview of recent challenges of DDL and the most relevant solutions from novel perspectives of communication efficiency and trustworthiness.
AutoMCM: Maneuver Coordination Service with Abstracted Functions for Autonomous Driving
Jul 14, 2021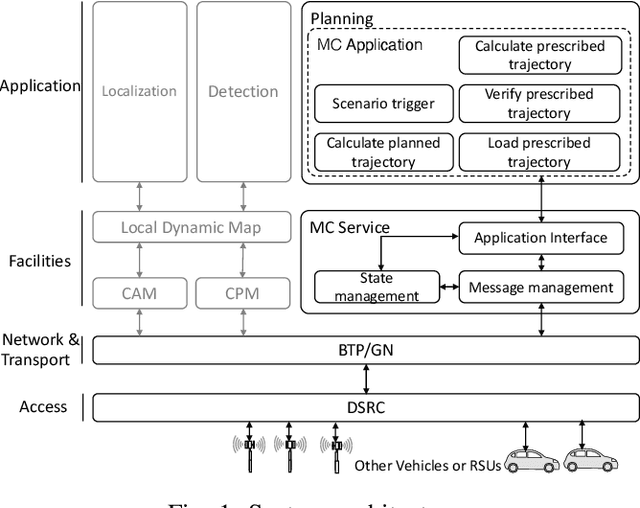
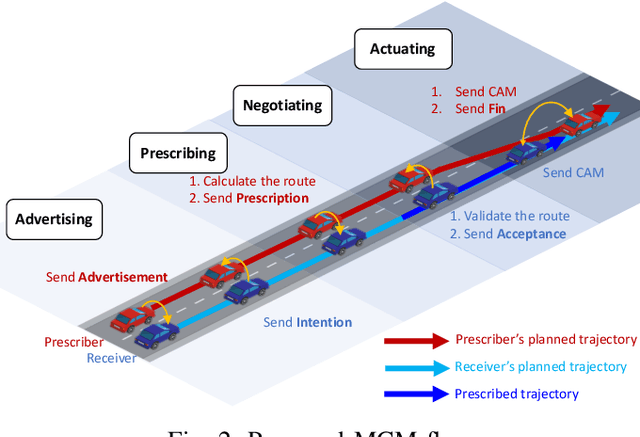
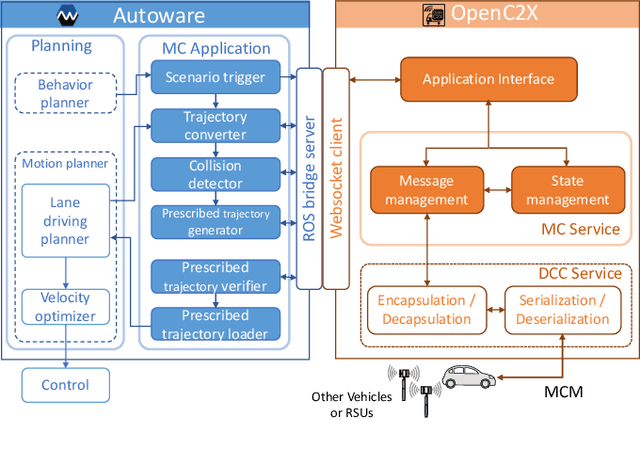
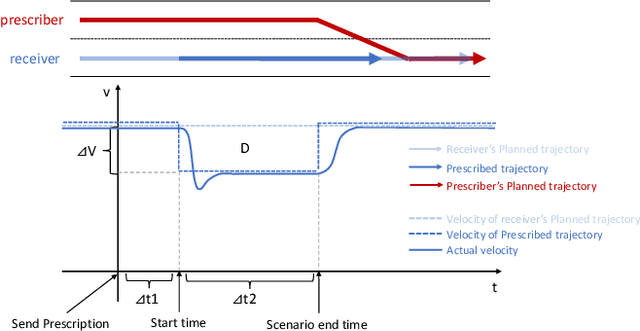
A cooperative intelligent transport system (C-ITS) uses vehicle-to-everything (V2X) technology to make self-driving vehicles safer and more efficient. Current C-ITS applications have mainly focused on real-time information sharing, such as for cooperative perception. In addition to better real-time perception, self-driving vehicles need to achieve higher safety and efficiency by coordinating action plans. This study designs a maneuver coordination (MC) protocol that uses seven messages to cover various scenarios and an abstracted MC support service. We implement our proposal as AutoMCM by extending two open-source software tools: Autoware for autonomous driving and OpenC2X for C-ITS. The results show that our system effectively reduces the communication bandwidth by limiting message exchange in an event-driven manner. Furthermore, it shows that the vehicles run 15% faster when the vehicle speed is 30 km/h and 28% faster when the vehicle speed is 50 km/h using our scheme. Our system shows robustness against packet loss in experiments when the message timeout parameters are appropriately set.