 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRaceMOP: Mapless Online Path Planning for Multi-Agent Autonomous Racing using Residual Policy Learning
Mar 11, 2024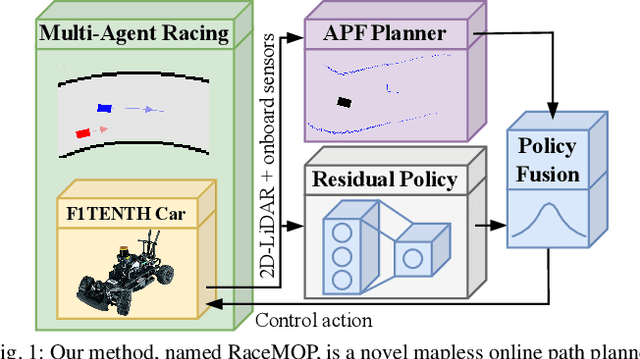
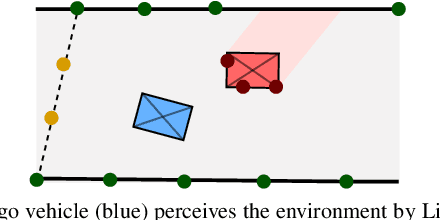
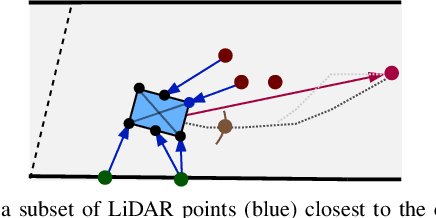
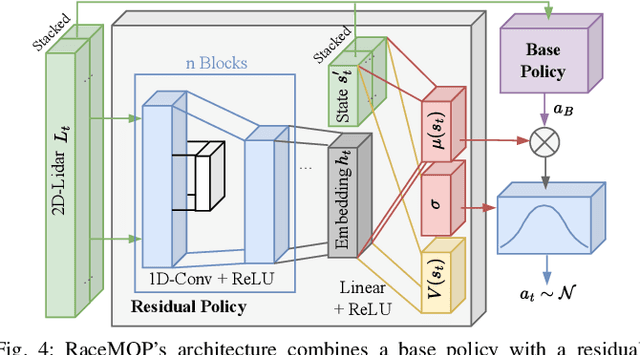
The interactive decision-making in multi-agent autonomous racing offers insights valuable beyond the domain of self-driving cars. Mapless online path planning is particularly of practical appeal but poses a challenge for safely overtaking opponents due to the limited planning horizon. Accordingly, this paper introduces RaceMOP, a novel method for mapless online path planning designed for multi-agent racing of F1TENTH cars. Unlike classical planners that depend on predefined racing lines, RaceMOP operates without a map, relying solely on local observations to overtake other race cars at high speed. Our approach combines an artificial potential field method as a base policy with residual policy learning to introduce long-horizon planning capabilities. We advance the field by introducing a novel approach for policy fusion with the residual policy directly in probability space. Our experiments for twelve simulated racetracks validate that RaceMOP is capable of long-horizon decision-making with robust collision avoidance during overtaking maneuvers. RaceMOP demonstrates superior handling over existing mapless planners while generalizing to unknown racetracks, paving the way for further use of our method in robotics. We make the open-source code for RaceMOP available at http://github.com/raphajaner/racemop.
Roadside LiDAR Assisted Cooperative Localization for Connected Autonomous Vehicles
Nov 14, 2023Advancements in LiDAR technology have led to more cost-effective production while simultaneously improving precision and resolution. As a result, LiDAR has become integral to vehicle localization, achieving centimeter-level accuracy through techniques like Normal Distributions Transform (NDT) and other advanced 3D registration algorithms. Nonetheless, these approaches are reliant on high-definition 3D point cloud maps, the creation of which involves significant expenditure. When such maps are unavailable or lack sufficient features for 3D registration algorithms, localization accuracy diminishes, posing a risk to road safety. To address this, we proposed to use LiDAR-equipped roadside unit and Vehicle-to-Infrastructure (V2I) communication to accurately estimate the connected autonomous vehicle's position and help the vehicle when its self-localization is not accurate enough. Our simulation results indicate that this method outperforms traditional NDT scan matching-based approaches in terms of localization accuracy.
Occlusion-Aware Path Planning for Collision Avoidance: Leveraging Potential Field Method with Responsibility-Sensitive Safety
Jun 12, 2023Collision avoidance (CA) has always been the foremost task for autonomous vehicles (AVs) under safety criteria. And path planning is directly responsible for generating a safe path to accomplish CA while satisfying other commands. Due to the real-time computation and simple structure, the potential field (PF) has emerged as one of the mainstream path-planning algorithms. However, the current PF is primarily simulated in ideal CA scenarios, assuming complete obstacle information while disregarding occlusion issues where obstacles can be partially or entirely hidden from the AV's sensors. During the occlusion period, the occluded obstacles do not possess a PF. Once the occlusion is over, these obstacles can generate an instantaneous virtual force that impacts the ego vehicle. Therefore, we propose an occlusion-aware path planning (OAPP) with the responsibility-sensitive safety (RSS)-based PF to tackle the occlusion problem for non-connected AVs. We first categorize the detected and occluded obstacles, and then we proceed to the RSS violation check. Finally, we can generate different virtual forces from the PF for occluded and non-occluded obstacles. We compare the proposed OAPP method with other PF-based path planning methods via MATLAB/Simulink. The simulation results indicate that the proposed method can eliminate instantaneous lateral oscillation or sway and produce a smoother path than conventional PF methods.
Time-to-Collision-Aware Lane-Change Strategy Based on Potential Field and Cubic Polynomial for Autonomous Vehicles
Jun 12, 2023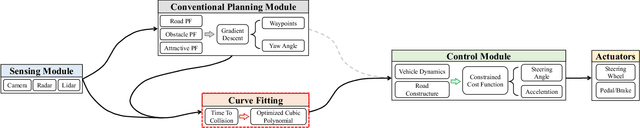
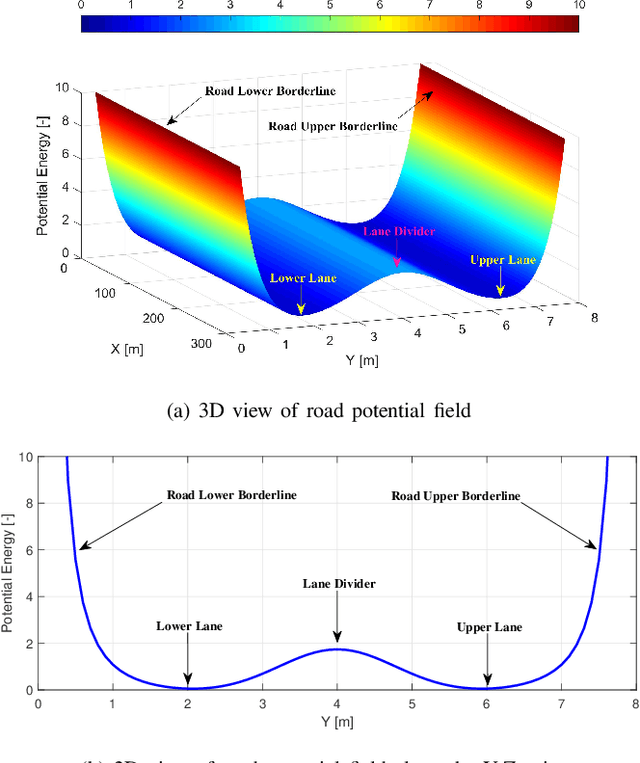
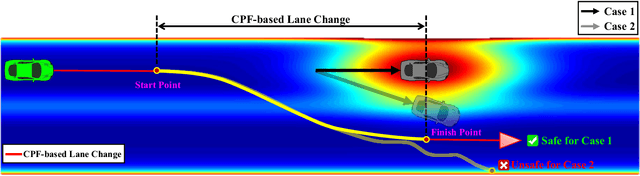
Making safe and successful lane changes (LCs) is one of the many vitally important functions of autonomous vehicles (AVs) that are needed to ensure safe driving on expressways. Recently, the simplicity and real-time performance of the potential field (PF) method have been leveraged to design decision and planning modules for AVs. However, the LC trajectory planned by the PF method is usually lengthy and takes the ego vehicle laterally parallel and close to the obstacle vehicle, which creates a dangerous situation if the obstacle vehicle suddenly steers. To mitigate this risk, we propose a time-to-collision-aware LC (TTCA-LC) strategy based on the PF and cubic polynomial in which the TTC constraint is imposed in the optimized curve fitting. The proposed approach is evaluated using MATLAB/Simulink under high-speed conditions in a comparative driving scenario. The simulation results indicate that the TTCA-LC method performs better than the conventional PF-based LC (CPF-LC) method in generating shorter, safer, and smoother trajectories. The length of the LC trajectory is shortened by over 27.1\%, and the curvature is reduced by approximately 56.1\% compared with the CPF-LC method.
Potential Field-based Path Planning with Interactive Speed Optimization for Autonomous Vehicles
Jun 12, 2023Path planning is critical for autonomous vehicles (AVs) to determine the optimal route while considering constraints and objectives. The potential field (PF) approach has become prevalent in path planning due to its simple structure and computational efficiency. However, current PF methods used in AVs focus solely on the path generation of the ego vehicle while assuming that the surrounding obstacle vehicles drive at a preset behavior without the PF-based path planner, which ignores the fact that the ego vehicle's PF could also impact the path generation of the obstacle vehicles. To tackle this problem, we propose a PF-based path planning approach where local paths are shared among ego and obstacle vehicles via vehicle-to-vehicle (V2V) communication. Then by integrating this shared local path into an objective function, a new optimization function called interactive speed optimization (ISO) is designed to allow driving safety and comfort for both ego and obstacle vehicles. The proposed method is evaluated using MATLAB/Simulink in the urgent merging scenarios by comparing it with conventional methods. The simulation results indicate that the proposed method can mitigate the impact of other AVs' PFs by slowing down in advance, effectively reducing the oscillations for both ego and obstacle AVs.