 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Safety under Multiple Constraints and Input Bounds using gatekeeper: Theory and Applications
Aug 13, 2025This letter presents an approach to guarantee online safety of a cyber-physical system under multiple state and input constraints. Our proposed framework, called gatekeeper, recursively guarantees the existence of an infinite-horizon trajectory that satisfies all constraints and system dynamics. Such trajectory is constructed using a backup controller, which we define formally in this paper. gatekeeper relies on a small number of verifiable assumptions, and is computationally efficient since it requires optimization over a single scalar variable. We make two primary contributions in this letter. (A) First, we develop the theory of gatekeeper: we derive a sub-optimality bound relative to a full nonlinear trajectory optimization problem, and show how this can be used in runtime to validate performance. This also informs the design of the backup controllers and sets. (B) Second, we demonstrate in detail an application of gatekeeper for multi-agent formation flight, where each Dubins agent must avoid multiple obstacles and weapons engagement zones, both of which are nonlinear, nonconvex constraints.
Adaptive Ergodic Search with Energy-Aware Scheduling for Persistent Multi-Robot Missions
May 16, 2025Autonomous robots are increasingly deployed for long-term information-gathering tasks, which pose two key challenges: planning informative trajectories in environments that evolve across space and time, and ensuring persistent operation under energy constraints. This paper presents a unified framework, mEclares, that addresses both challenges through adaptive ergodic search and energy-aware scheduling in multi-robot systems. Our contributions are two-fold: (1) we model real-world variability using stochastic spatiotemporal environments, where the underlying information evolves unpredictably due to process uncertainty. To guide exploration, we construct a target information spatial distribution (TISD) based on clarity, a metric that captures the decay of information in the absence of observations and highlights regions of high uncertainty; and (2) we introduce Robustmesch (Rmesch), an online scheduling method that enables persistent operation by coordinating rechargeable robots sharing a single mobile charging station. Unlike prior work, our approach avoids reliance on preplanned schedules, static or dedicated charging stations, and simplified robot dynamics. Instead, the scheduler supports general nonlinear models, accounts for uncertainty in the estimated position of the charging station, and handles central node failures. The proposed framework is validated through real-world hardware experiments, and feasibility guarantees are provided under specific assumptions.
Certifiably-Correct Mapping for Safe Navigation Despite Odometry Drift
Apr 25, 2025Accurate perception, state estimation and mapping are essential for safe robotic navigation as planners and controllers rely on these components for safety-critical decisions. However, existing mapping approaches often assume perfect pose estimates, an unrealistic assumption that can lead to incorrect obstacle maps and therefore collisions. This paper introduces a framework for certifiably-correct mapping that ensures that the obstacle map correctly classifies obstacle-free regions despite the odometry drift in vision-based localization systems (VIO}/SLAM). By deflating the safe region based on the incremental odometry error at each timestep, we ensure that the map remains accurate and reliable locally around the robot, even as the overall odometry error with respect to the inertial frame grows unbounded. Our contributions include two approaches to modify popular obstacle mapping paradigms, (I) Safe Flight Corridors, and (II) Signed Distance Fields. We formally prove the correctness of both methods, and describe how they integrate with existing planning and control modules. Simulations using the Replica dataset highlight the efficacy of our methods compared to state-of-the-art techniques. Real-world experiments with a robotic rover show that, while baseline methods result in collisions with previously mapped obstacles, the proposed framework enables the rover to safely stop before potential collisions.
Enabling Safety for Aerial Robots: Planning and Control Architectures
Apr 11, 2025Ensuring safe autonomy is crucial for deploying aerial robots in real-world applications. However, safety is a multifaceted challenge that must be addressed from multiple perspectives, including navigation in dynamic environments, operation under resource constraints, and robustness against adversarial attacks and uncertainties. In this paper, we present the authors' recent work that tackles some of these challenges and highlights key aspects that must be considered to enhance the safety and performance of autonomous aerial systems. All presented approaches are validated through hardware experiments.
Multi-Agent Clarity-Aware Dynamic Coverage with Gaussian Processes
Mar 26, 2024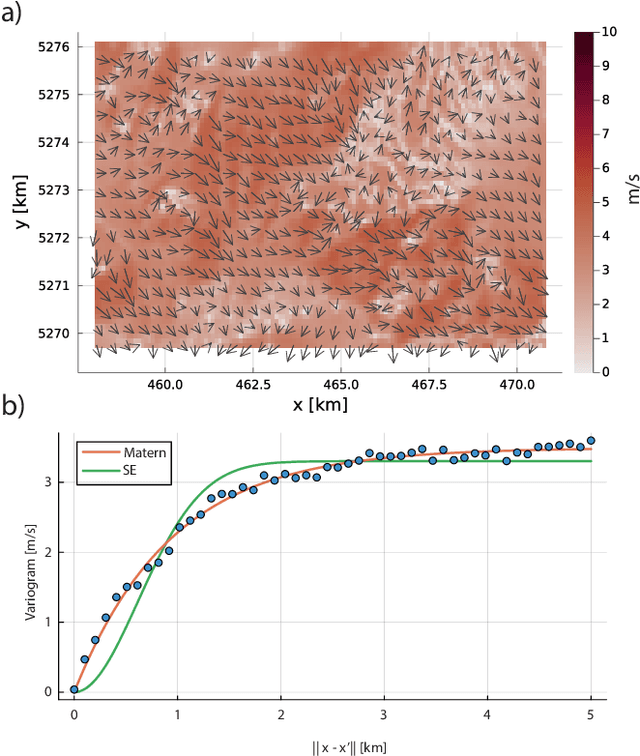
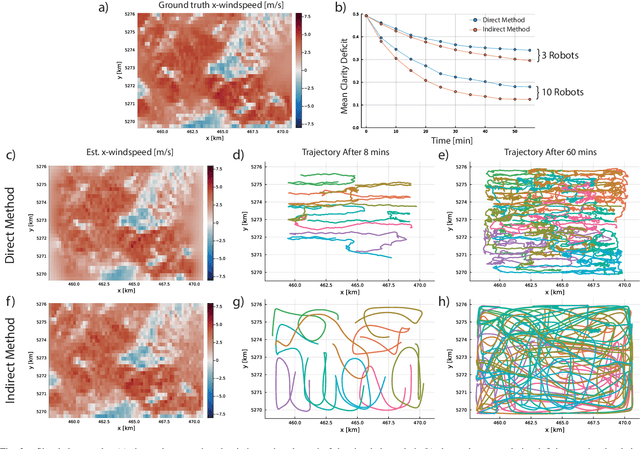
This paper presents two algorithms for multi-agent dynamic coverage in spatiotemporal environments, where the coverage algorithms are informed by the method of data assimilation. In particular, we show that by considering the information assimilation algorithm, here a Numerical Gaussian Process Kalman Filter, the influence of measurements taken at one position on the uncertainty of the estimate at another location can be computed. We use this relationship to propose new coverage algorithms. Furthermore, we show that the controllers naturally extend to the multi-agent context, allowing for a distributed-control central-information paradigm for multi-agent coverage. Finally, we demonstrate the algorithms through a realistic simulation of a team of UAVs collecting wind data over a region in Austria.
A Constructive Method for Designing Safe Multirate Controllers for Differentially-Flat Systems
Mar 26, 2024We present a multi-rate control architecture that leverages fundamental properties of differential flatness to synthesize controllers for safety-critical nonlinear dynamical systems. We propose a two-layer architecture, where the high-level generates reference trajectories using a linear Model Predictive Controller, and the low-level tracks this reference using a feedback controller. The novelty lies in how we couple these layers, to achieve formal guarantees on recursive feasibility of the MPC problem, and safety of the nonlinear system. Furthermore, using differential flatness, we provide a constructive means to synthesize the multi-rate controller, thereby removing the need to search for suitable Lyapunov or barrier functions, or to approximately linearize/discretize nonlinear dynamics. We show the synthesized controller is a convex optimization problem, making it amenable to real-time implementations. The method is demonstrated experimentally on a ground rover and a quadruped robotic system.
* 6 pages, 3 figures, accepted at IEEE Control Systems Letters 2021
Safe and Robust Observer-Controller Synthesis using Control Barrier Functions
Nov 25, 2022This paper addresses the synthesis of safety-critical controllers using estimate feedback. We propose an observer-controller interconnection to ensure that the nonlinear system remains safe despite bounded disturbances on the system dynamics and measurements that correspond to partial state information. The co-design of observers and controllers is critical, since even in undisturbed cases, observers and controllers designed independently may not render the system safe. We propose two approaches to synthesize observer-controller interconnections. The first approach utilizes Input-to-State Stable observers, and the second uses Bounded Error observers. Using these stability and boundedness properties of the observation error, we construct novel Control Barrier Functions that impose inequality constraints on the control inputs which, when satisfied, certifies safety. We propose quadratic program-based controllers to satisfy these constraints, and prove Lipschitz continuity of the derived controllers. Simulations and experiments on a quadrotor demonstrate the efficacy of the proposed methods.
* 6 pages, 4 figures. Accepted at LCSS, CDC 2023