 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Safety for Aerial Robots: Planning and Control Architectures
Apr 11, 2025Ensuring safe autonomy is crucial for deploying aerial robots in real-world applications. However, safety is a multifaceted challenge that must be addressed from multiple perspectives, including navigation in dynamic environments, operation under resource constraints, and robustness against adversarial attacks and uncertainties. In this paper, we present the authors' recent work that tackles some of these challenges and highlights key aspects that must be considered to enhance the safety and performance of autonomous aerial systems. All presented approaches are validated through hardware experiments.
Embodied Supervision: Haptic Display of Automation Command to Improve Supervisory Performance
Feb 28, 2024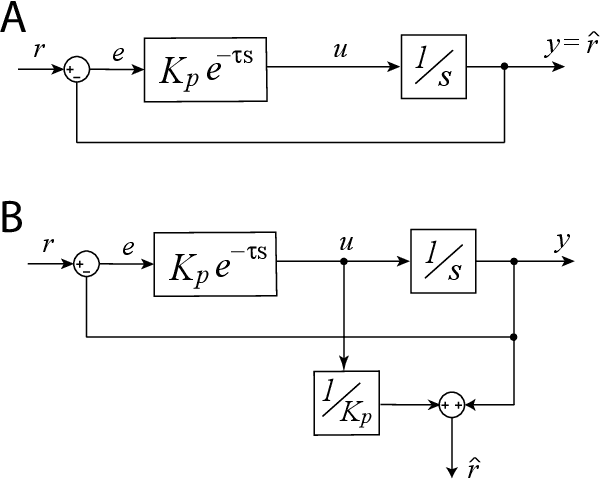
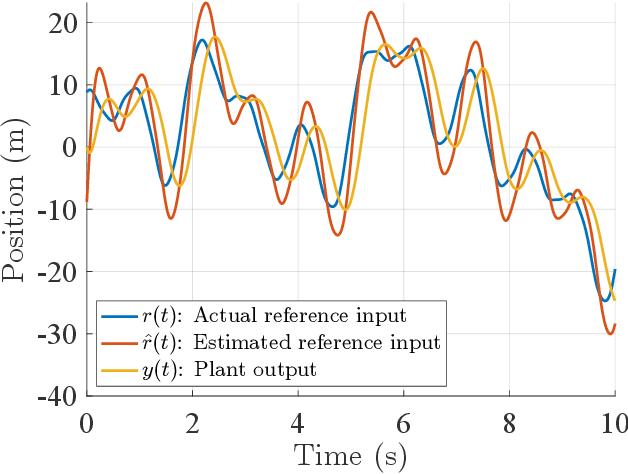
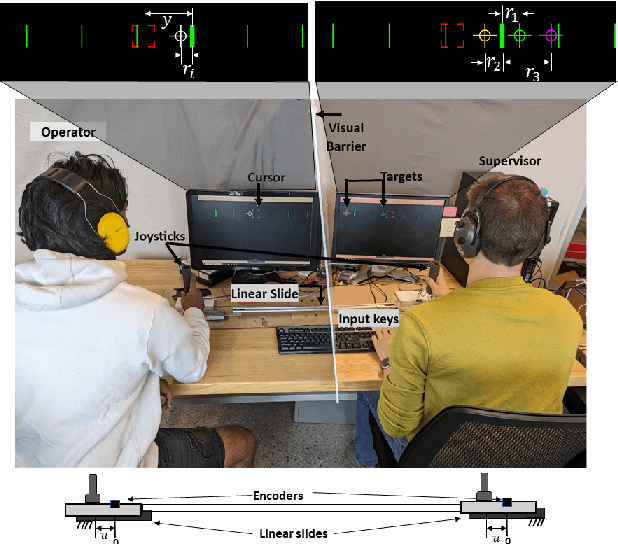
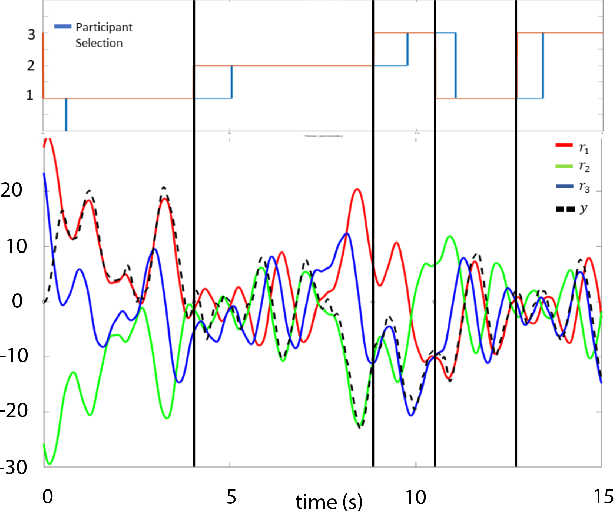
A human operator using a manual control interface has ready access to their own command signal, both by efference copy and proprioception. In contrast, a human supervisor typically relies on visual information alone. We propose supplying a supervisor with a copy of the operators command signal, hypothesizing improved performance, especially when that copy is provided through haptic display. We experimentally compared haptic with visual access to the command signal, quantifying the performance of N equals 10 participants attempting to determine which of three reference signals was being tracked by an operator. Results indicate an improved accuracy in identifying the tracked target when haptic display was available relative to visual display alone. We conjecture the benefit follows from the relationship of haptics to the supervisor's own experience, perhaps muscle memory, as an operator.