 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvably Safe Stein Variational Clarity-Aware Informative Planning
Nov 13, 2025Autonomous robots are increasingly deployed for information-gathering tasks in environments that vary across space and time. Planning informative and safe trajectories in such settings is challenging because information decays when regions are not revisited. Most existing planners model information as static or uniformly decaying, ignoring environments where the decay rate varies spatially; those that model non-uniform decay often overlook how it evolves along the robot's motion, and almost all treat safety as a soft penalty. In this paper, we address these challenges. We model uncertainty in the environment using clarity, a normalized representation of differential entropy from our earlier work that captures how information improves through new measurements and decays over time when regions are not revisited. Building on this, we present Stein Variational Clarity-Aware Informative Planning, a framework that embeds clarity dynamics within trajectory optimization and enforces safety through a low-level filtering mechanism based on our earlier gatekeeper framework for safety verification. The planner performs Bayesian inference-based learning via Stein variational inference, refining a distribution over informative trajectories while filtering each nominal Stein informative trajectory to ensure safety. Hardware experiments and simulations across environments with varying decay rates and obstacles demonstrate consistent safety and reduced information deficits.
Adaptive Ergodic Search with Energy-Aware Scheduling for Persistent Multi-Robot Missions
May 16, 2025Autonomous robots are increasingly deployed for long-term information-gathering tasks, which pose two key challenges: planning informative trajectories in environments that evolve across space and time, and ensuring persistent operation under energy constraints. This paper presents a unified framework, mEclares, that addresses both challenges through adaptive ergodic search and energy-aware scheduling in multi-robot systems. Our contributions are two-fold: (1) we model real-world variability using stochastic spatiotemporal environments, where the underlying information evolves unpredictably due to process uncertainty. To guide exploration, we construct a target information spatial distribution (TISD) based on clarity, a metric that captures the decay of information in the absence of observations and highlights regions of high uncertainty; and (2) we introduce Robustmesch (Rmesch), an online scheduling method that enables persistent operation by coordinating rechargeable robots sharing a single mobile charging station. Unlike prior work, our approach avoids reliance on preplanned schedules, static or dedicated charging stations, and simplified robot dynamics. Instead, the scheduler supports general nonlinear models, accounts for uncertainty in the estimated position of the charging station, and handles central node failures. The proposed framework is validated through real-world hardware experiments, and feasibility guarantees are provided under specific assumptions.
Enabling Safety for Aerial Robots: Planning and Control Architectures
Apr 11, 2025Ensuring safe autonomy is crucial for deploying aerial robots in real-world applications. However, safety is a multifaceted challenge that must be addressed from multiple perspectives, including navigation in dynamic environments, operation under resource constraints, and robustness against adversarial attacks and uncertainties. In this paper, we present the authors' recent work that tackles some of these challenges and highlights key aspects that must be considered to enhance the safety and performance of autonomous aerial systems. All presented approaches are validated through hardware experiments.
meSch: Multi-Agent Energy-Aware Scheduling for Task Persistence
Jun 07, 2024This paper develops a scheduling protocol for a team of autonomous robots that operate in long-term persistent tasks. The proposed framework, called meSch, accounts for the robots' limited battery capacity and the presence of a single charging station, and achieves the following contributions: 1) First, it guarantees exclusive use of the charging station by one robot at a time; the approach is online, applicable to general nonlinear robot models, does not require robots to be deployed at different times, and can handle robots with different discharge rates. 2) Second, we consider the scenario when the charging station is mobile and subject to uncertainty. This approach ensures that the robots can rendezvous with the charging station while considering the uncertainty in its position. Finally, we provide the evaluation of the efficacy of meSch in simulation and experimental case studies.
Eclares: Energy-Aware Clarity-Driven Ergodic Search
Oct 12, 2023Planning informative trajectories while considering the spatial distribution of the information over the environment, as well as constraints such as the robot's limited battery capacity, makes the long-time horizon persistent coverage problem complex. Ergodic search methods consider the spatial distribution of environmental information while optimizing robot trajectories; however, current methods lack the ability to construct the target information spatial distribution for environments that vary stochastically across space and time. Moreover, current coverage methods dealing with battery capacity constraints either assume simple robot and battery models, or are computationally expensive. To address these problems, we propose a framework called Eclares, in which our contribution is two-fold. 1) First, we propose a method to construct the target information spatial distribution for ergodic trajectory optimization using clarity, an information measure bounded between [0,1]. The clarity dynamics allows us to capture information decay due to lack of measurements and to quantify the maximum attainable information in stochastic spatiotemporal environments. 2) Second, instead of directly tracking the ergodic trajectory, we introduce the energy-aware (eware) filter, which iteratively validates the ergodic trajectory to ensure that the robot has enough energy to return to the charging station when needed. The proposed eware filter is applicable to nonlinear robot models and is computationally lightweight. We demonstrate the working of the framework through a simulation case study.
Trajectory Planning for Autonomous Vehicles Using Hierarchical Reinforcement Learning
Nov 09, 2020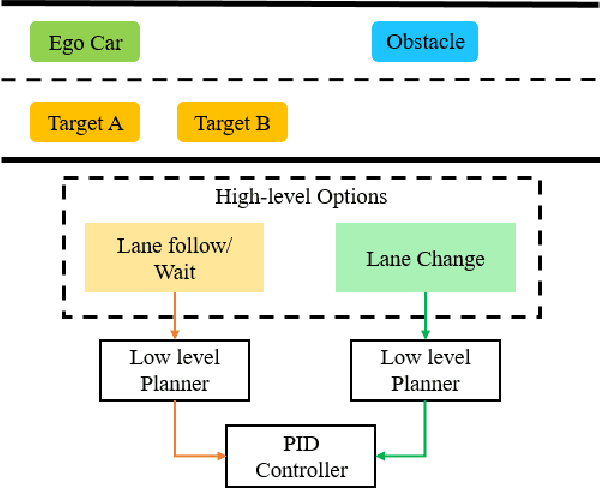
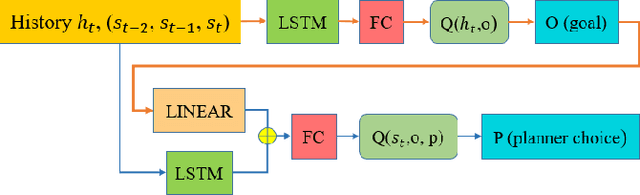

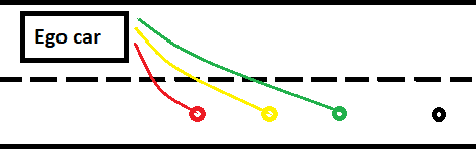
Planning safe trajectories under uncertain and dynamic conditions makes the autonomous driving problem significantly complex. Current sampling-based methods such as Rapidly Exploring Random Trees (RRTs) are not ideal for this problem because of the high computational cost. Supervised learning methods such as Imitation Learning lack generalization and safety guarantees. To address these problems and in order to ensure a robust framework, we propose a Hierarchical Reinforcement Learning (HRL) structure combined with a Proportional-Integral-Derivative (PID) controller for trajectory planning. HRL helps divide the task of autonomous vehicle driving into sub-goals and supports the network to learn policies for both high-level options and low-level trajectory planner choices. The introduction of sub-goals decreases convergence time and enables the policies learned to be reused for other scenarios. In addition, the proposed planner is made robust by guaranteeing smooth trajectories and by handling the noisy perception system of the ego-car. The PID controller is used for tracking the waypoints, which ensures smooth trajectories and reduces jerk. The problem of incomplete observations is handled by using a Long-Short-Term-Memory (LSTM) layer in the network. Results from the high-fidelity CARLA simulator indicate that the proposed method reduces convergence time, generates smoother trajectories, and is able to handle dynamic surroundings and noisy observations.