 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Safety for Aerial Robots: Planning and Control Architectures
Apr 11, 2025Ensuring safe autonomy is crucial for deploying aerial robots in real-world applications. However, safety is a multifaceted challenge that must be addressed from multiple perspectives, including navigation in dynamic environments, operation under resource constraints, and robustness against adversarial attacks and uncertainties. In this paper, we present the authors' recent work that tackles some of these challenges and highlights key aspects that must be considered to enhance the safety and performance of autonomous aerial systems. All presented approaches are validated through hardware experiments.
IDCAIS: Inter-Defender Collision-Aware Interception Strategy against Multiple Attackers
Dec 22, 2021


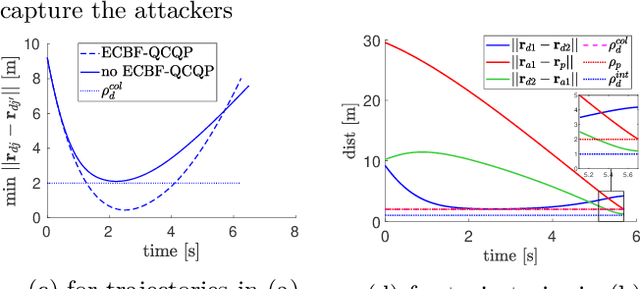
This paper presents an Inter-Defender Collision-Aware Interception Strategy (IDCAIS) for defenders to intercept attackers in order to defend a protected area, such that each defender also avoids collision with other defenders. In particular, the defenders are assigned to intercept attackers using a mixed-integer quadratic program (MIQP) that: 1)minimizes the sum of times taken by defenders to capture the attackers under time-optimal control, and2) helps eliminate or delay possible future collisions among the defenders on the optimal trajectories. To prevent inevitable collisions on optimal trajectories or collisions arising due to time-sub-optimal behavior by the attackers, a minimally augmented control using exponential control barrier function (ECBF) is provided. Simulations show the efficacy of the approach.
Approximate Time-Optimal Trajectories for Damped Double Integrator in 2D Obstacle Environments under Bounded Inputs
Jul 13, 2020


This article provides extensions to existing path-velocity decomposition based time optimal trajectory planning algorithm \cite{kant1986toward} to scenarios in which agents move in 2D obstacle environment under double integrator dynamics with drag term (damped double integrator). Particularly, we extend the idea of a tangent graph \cite{liu1992path} to $\calC^1$-Tangent graph to find continuously differentiable ($\calC^1$) shortest path between any two points. $\calC^1$-Tangent graph has a continuously differentiable ($\calC^1$) path between any two nodes. We also provide analytical expressions for a near time-optimal velocity profile for an agent moving on these shortest paths under the damped double integrator with bounded acceleration.
Multi-Swarm Herding: Protecting against Adversarial Swarms
Jul 08, 2020



This paper studies a defense approach against one or more swarms of adversarial agents. In our earlier work, we employ a closed formation (`StringNet') of defending agents (defenders) around a swarm of adversarial agents (attackers) to confine their motion within given bounds, and guide them to a safe area. The control design relies on the assumption that the adversarial agents remain close enough to each other, i.e., within a prescribed connectivity region. To handle situations when the attackers no longer stay within such a connectivity region, but rather split into smaller swarms (clusters) to maximize the chance or impact of attack, this paper proposes an approach to learn the attacking sub-swarms and reassign defenders towards the attackers. We use a `Density-based Spatial Clustering of Application with Noise (DBSCAN)' algorithm to identify the spatially distributed swarms of the attackers. Then, the defenders are assigned to each identified swarm of attackers by solving a constrained generalized assignment problem. Simulations are provided to demonstrate the effectiveness of the approach.