 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributionally Robust Safety Under Arbitrary Uncertainties: A Safety Filtering Approach
May 13, 2026In this work, we study how to ensure probabilistic safety for nonlinear systems under distributional ambiguity. Our approach builds on a backup-based safety filtering framework that switches between a high-performance nominal policy and a certified backup policy to ensure safety. To handle arbitrary uncertainties from ambiguous distributions, i.e., where the distribution is not of specific structure and the true distribution is unknown, we adopt a distributionally robust (DR) formulation using Wasserstein ambiguity sets. Rather than solving a high-dimensional DR trajectory optimization problem online, we exploit the structure of backup-based safety filtering to reduce safety certification to a one-dimensional search over the switching time between nominal and backup policies. We then develop a sampling-based certification procedure with finite-sample guarantees, where empirical failure probabilities are compared against a Wasserstein-inflated threshold. We validate our method through simulations across three systems, from a Dubins vehicle to a high-speed racing car and a fighter jet, demonstrating the broad applicability and computational efficiency.
Constraint Selection in Optimization-Based Controllers
May 06, 2025Human-machine collaboration often involves constrained optimization problems for decision-making processes. However, when the machine is a dynamical system with a continuously evolving state, infeasibility due to multiple conflicting constraints can lead to dangerous outcomes. In this work, we propose a heuristic-based method that resolves infeasibility at every time step by selectively disregarding a subset of soft constraints based on the past values of the Lagrange multipliers. Compared to existing approaches, our method requires the solution of a smaller optimization problem to determine feasibility, resulting in significantly faster computation. Through a series of simulations, we demonstrate that our algorithm achieves performance comparable to state-of-the-art methods while offering improved computational efficiency.
Enabling Safety for Aerial Robots: Planning and Control Architectures
Apr 11, 2025Ensuring safe autonomy is crucial for deploying aerial robots in real-world applications. However, safety is a multifaceted challenge that must be addressed from multiple perspectives, including navigation in dynamic environments, operation under resource constraints, and robustness against adversarial attacks and uncertainties. In this paper, we present the authors' recent work that tackles some of these challenges and highlights key aspects that must be considered to enhance the safety and performance of autonomous aerial systems. All presented approaches are validated through hardware experiments.
Distributed Resilience-Aware Control in Multi-Robot Networks
Apr 04, 2025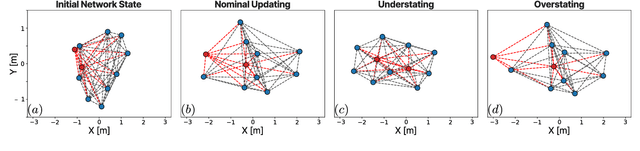
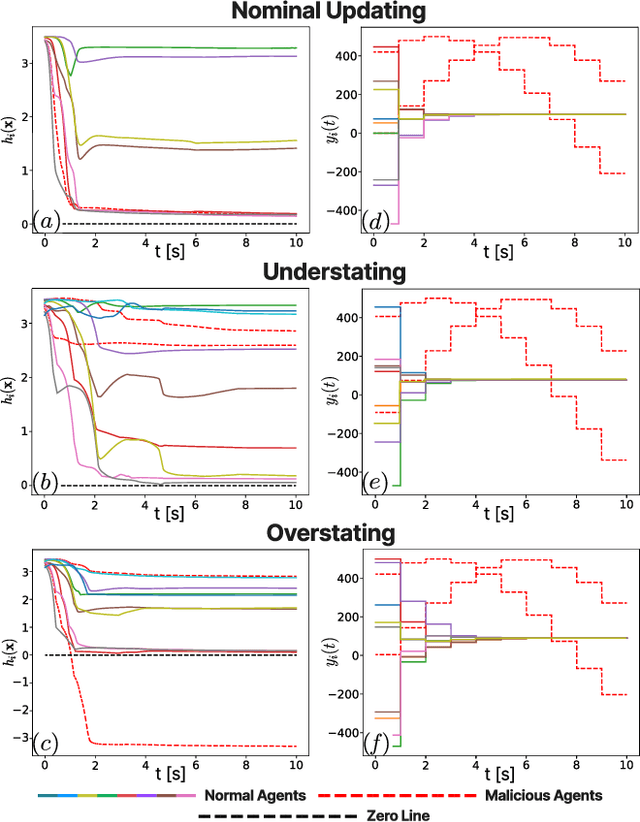
Ensuring resilient consensus in multi-robot systems with misbehaving agents remains a challenge, as many existing network resilience properties are inherently combinatorial and globally defined. While previous works have proposed control laws to enhance or preserve resilience in multi-robot networks, they often assume a fixed topology with known resilience properties, or require global state knowledge. These assumptions may be impractical in physically-constrained environments, where safety and resilience requirements are conflicting, or when misbehaving agents corrupt the shared information. In this work, we propose a distributed control law that enables each robot to guarantee resilient consensus and safety during its navigation without fixed topologies using only locally available information. To this end, we establish a new sufficient condition for resilient consensus in time-varying networks based on the degree of non-misbehaving or normal agents. Using this condition, we design a Control Barrier Function (CBF)-based controller that guarantees resilient consensus and collision avoidance without requiring estimates of global state and/or control actions of all other robots. Finally, we validate our method through simulations.
Computational Imaging for Long-Term Prediction of Solar Irradiance
Sep 18, 2024
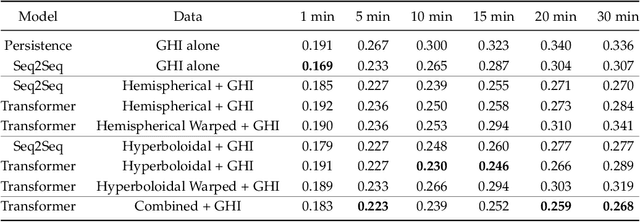


The occlusion of the sun by clouds is one of the primary sources of uncertainties in solar power generation, and is a factor that affects the wide-spread use of solar power as a primary energy source. Real-time forecasting of cloud movement and, as a result, solar irradiance is necessary to schedule and allocate energy across grid-connected photovoltaic systems. Previous works monitored cloud movement using wide-angle field of view imagery of the sky. However, such images have poor resolution for clouds that appear near the horizon, which reduces their effectiveness for long term prediction of solar occlusion. Specifically, to be able to predict occlusion of the sun over long time periods, clouds that are near the horizon need to be detected, and their velocities estimated precisely. To enable such a system, we design and deploy a catadioptric system that delivers wide-angle imagery with uniform spatial resolution of the sky over its field of view. To enable prediction over a longer time horizon, we design an algorithm that uses carefully selected spatio-temporal slices of the imagery using estimated wind direction and velocity as inputs. Using ray-tracing simulations as well as a real testbed deployed outdoors, we show that the system is capable of predicting solar occlusion as well as irradiance for tens of minutes in the future, which is an order of magnitude improvement over prior work.
Toward Automated Detection of Microbleeds with Anatomical Scale Localization: A Complete Clinical Diagnosis Support Using Deep Learning
Jun 22, 2023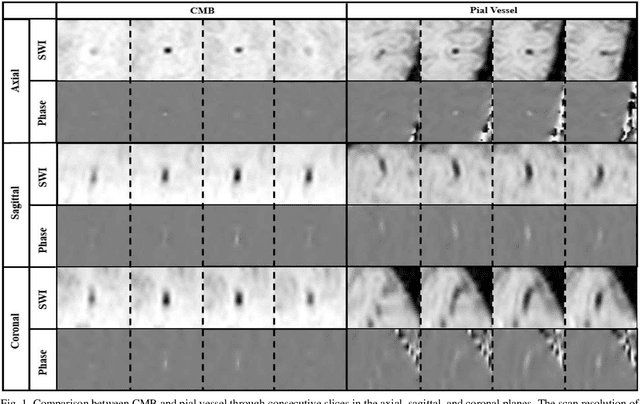
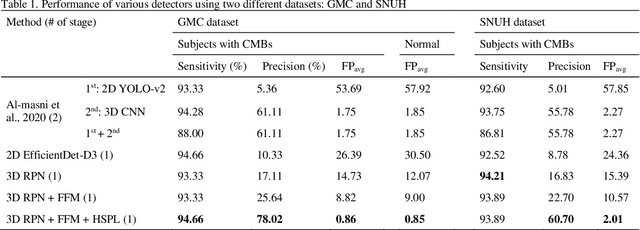
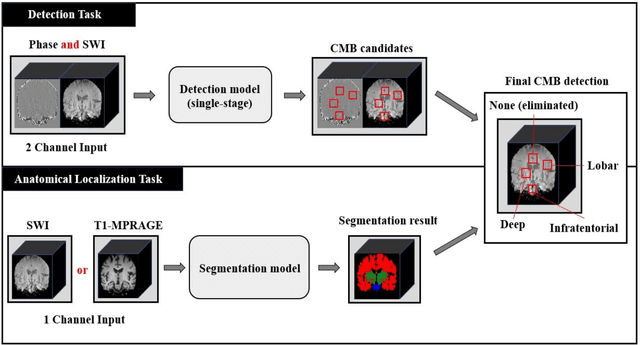
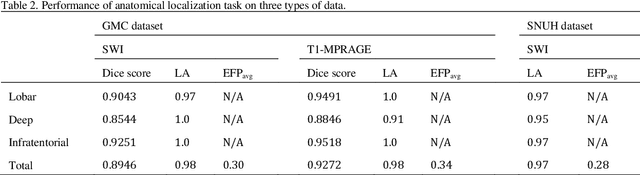
Cerebral Microbleeds (CMBs) are chronic deposits of small blood products in the brain tissues, which have explicit relation to various cerebrovascular diseases depending on their anatomical location, including cognitive decline, intracerebral hemorrhage, and cerebral infarction. However, manual detection of CMBs is a time-consuming and error-prone process because of their sparse and tiny structural properties. The detection of CMBs is commonly affected by the presence of many CMB mimics that cause a high false-positive rate (FPR), such as calcification and pial vessels. This paper proposes a novel 3D deep learning framework that does not only detect CMBs but also inform their anatomical location in the brain (i.e., lobar, deep, and infratentorial regions). For the CMB detection task, we propose a single end-to-end model by leveraging the U-Net as a backbone with Region Proposal Network (RPN). To significantly reduce the FPs within the same single model, we develop a new scheme, containing Feature Fusion Module (FFM) that detects small candidates utilizing contextual information and Hard Sample Prototype Learning (HSPL) that mines CMB mimics and generates additional loss term called concentration loss using Convolutional Prototype Learning (CPL). The anatomical localization task does not only tell to which region the CMBs belong but also eliminate some FPs from the detection task by utilizing anatomical information. The results show that the proposed RPN that utilizes the FFM and HSPL outperforms the vanilla RPN and achieves a sensitivity of 94.66% vs. 93.33% and an average number of false positives per subject (FPavg) of 0.86 vs. 14.73. Also, the anatomical localization task further improves the detection performance by reducing the FPavg to 0.56 while maintaining the sensitivity of 94.66%.