 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHydroShear: Hydroelastic Shear Simulation for Tactile Sim-to-Real Reinforcement Learning
Feb 28, 2026In this paper, we address the problem of tactile sim-to-real policy transfer for contact-rich tasks. Existing methods primarily focus on vision-based sensors and emphasize image rendering quality while providing overly simplistic models of force and shear. Consequently, these models exhibit a large sim-to-real gap for many dexterous tasks. Here, we present HydroShear, a non-holonomic hydroelastic tactile simulator that advances the state-of-the-art by modeling: a) stick-slip transitions, b) path-dependent force and shear build up, and c) full SE(3) object-sensor interactions. HydroShear extends hydroelastic contact models using Signed Distance Functions (SDFs) to track the displacements of the on-surface points of an indenter during physical interaction with the sensor membrane. Our approach generates physics-based, computationally efficient force fields from arbitrary watertight geometries while remaining agnostic to the underlying physics engine. In experiments with GelSight Minis, HydroShear more faithfully reproduces real tactile shear compared to existing methods. This fidelity enables zero-shot sim-to-real transfer of reinforcement learning policies across four tasks: peg insertion, bin packing, book shelving for insertion, and drawer pulling for fine gripper control under slip. Our method achieves a 93% average success rate, outperforming policies trained on tactile images (34%) and alternative shear simulation methods (58%-61%).
Hydrosoft: Non-Holonomic Hydroelastic Models for Compliant Tactile Manipulation
Sep 16, 2025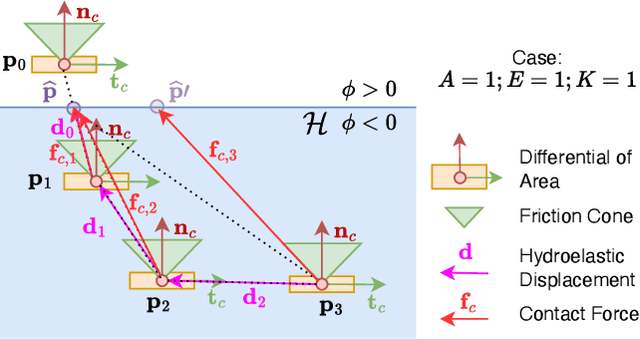
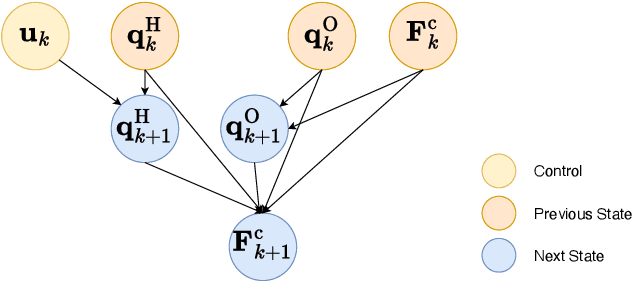
Tactile sensors have long been valued for their perceptual capabilities, offering rich insights into the otherwise hidden interface between the robot and grasped objects. Yet their inherent compliance -- a key driver of force-rich interactions -- remains underexplored. The central challenge is to capture the complex, nonlinear dynamics introduced by these passive-compliant elements. Here, we present a computationally efficient non-holonomic hydroelastic model that accurately models path-dependent contact force distributions and dynamic surface area variations. Our insight is to extend the object's state space, explicitly incorporating the distributed forces generated by the compliant sensor. Our differentiable formulation not only accounts for path-dependent behavior but also enables gradient-based trajectory optimization, seamlessly integrating with high-resolution tactile feedback. We demonstrate the effectiveness of our approach across a range of simulated and real-world experiments and highlight the importance of modeling the path dependence of sensor dynamics.
meSch: Multi-Agent Energy-Aware Scheduling for Task Persistence
Jun 07, 2024This paper develops a scheduling protocol for a team of autonomous robots that operate in long-term persistent tasks. The proposed framework, called meSch, accounts for the robots' limited battery capacity and the presence of a single charging station, and achieves the following contributions: 1) First, it guarantees exclusive use of the charging station by one robot at a time; the approach is online, applicable to general nonlinear robot models, does not require robots to be deployed at different times, and can handle robots with different discharge rates. 2) Second, we consider the scenario when the charging station is mobile and subject to uncertainty. This approach ensures that the robots can rendezvous with the charging station while considering the uncertainty in its position. Finally, we provide the evaluation of the efficacy of meSch in simulation and experimental case studies.