 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied Supervision: Haptic Display of Automation Command to Improve Supervisory Performance
Feb 28, 2024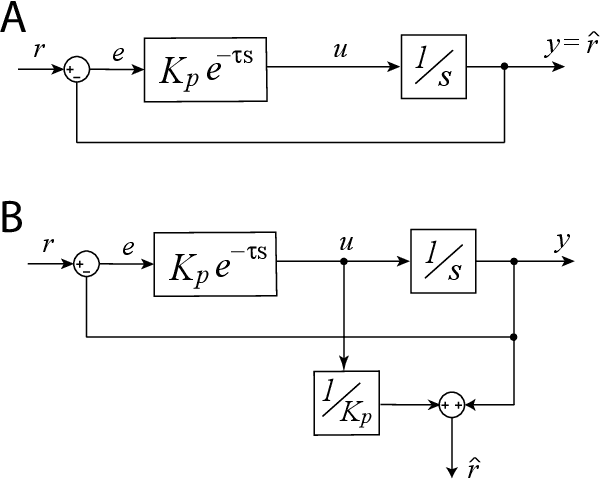
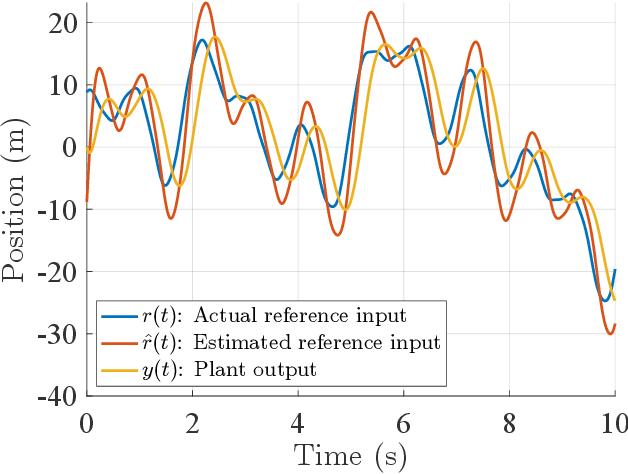
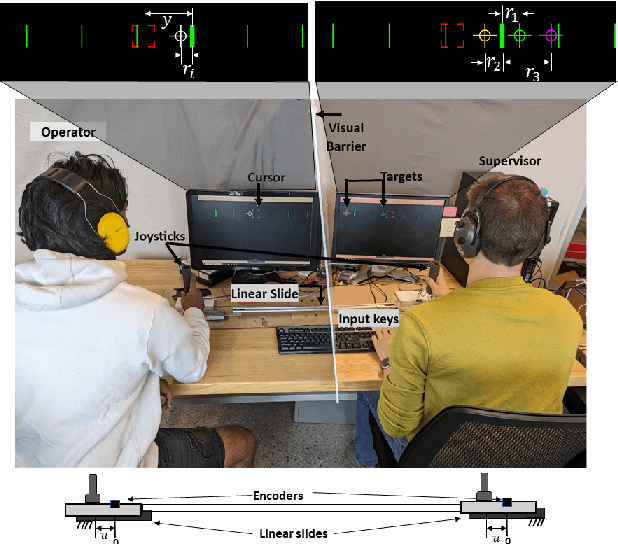
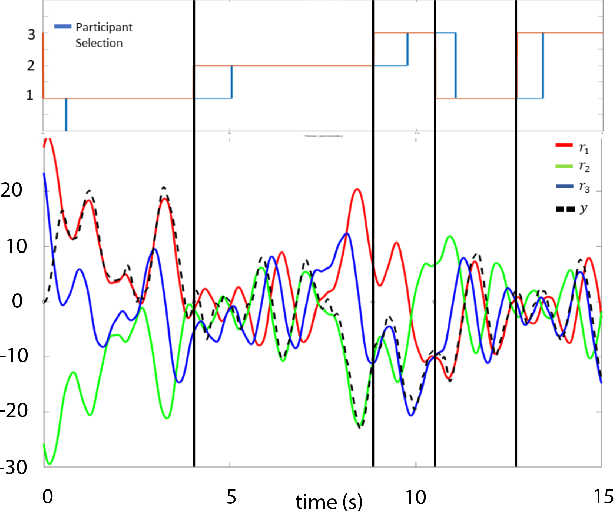
A human operator using a manual control interface has ready access to their own command signal, both by efference copy and proprioception. In contrast, a human supervisor typically relies on visual information alone. We propose supplying a supervisor with a copy of the operators command signal, hypothesizing improved performance, especially when that copy is provided through haptic display. We experimentally compared haptic with visual access to the command signal, quantifying the performance of N equals 10 participants attempting to determine which of three reference signals was being tracked by an operator. Results indicate an improved accuracy in identifying the tracked target when haptic display was available relative to visual display alone. We conjecture the benefit follows from the relationship of haptics to the supervisor's own experience, perhaps muscle memory, as an operator.
Estimation and Decomposition of Rack Force for Driving on Uneven Roads
Jul 12, 2020



The force transmitted from the front tires to the steering rack of a vehicle, called the rack force, plays an important role in the function of electric power steering (EPS) systems. Estimates of rack force can be used by EPS to attenuate road feedback and reduce driver effort. Further, estimates of the components of rack force (arising, for example, due to steering angle and road profile) can be used to separately compensate for each component and thereby enhance steering feel. In this paper, we present three vehicle and tire model-based rack force estimators that utilize sensed steering angle and road profile to estimate total rack force and individual components of rack force. We test and compare the real-time performance of the estimators by performing driving experiments with non-aggressive and aggressive steering maneuvers on roads with low and high frequency profile variations. The results indicate that for aggressive maneuvers the estimators using non-linear tire models produce more accurate rack force estimates. Moreover, only the estimator that incorporates a semi-empirical Rigid Ring tire model is able to capture rack force variation for driving on a road with high frequency profile variation. Finally, we present results from a simulation study to validate the component-wise estimates of rack force.
Koopman-based Control of a Soft Continuum Manipulator Under Variable Loading Conditions
Feb 04, 2020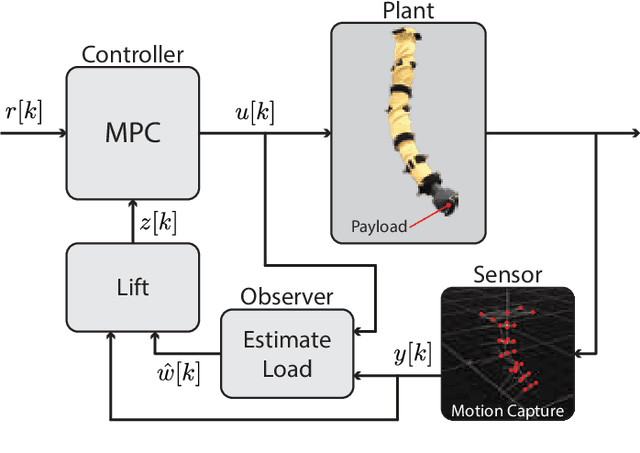
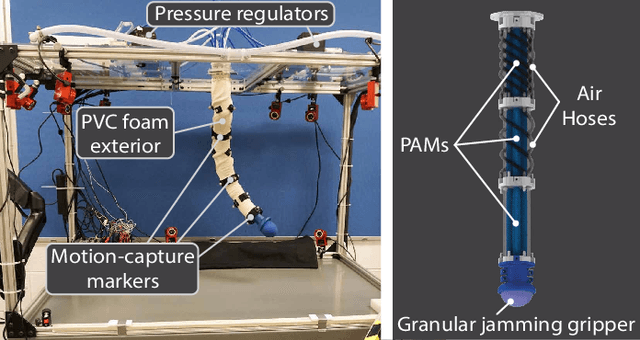
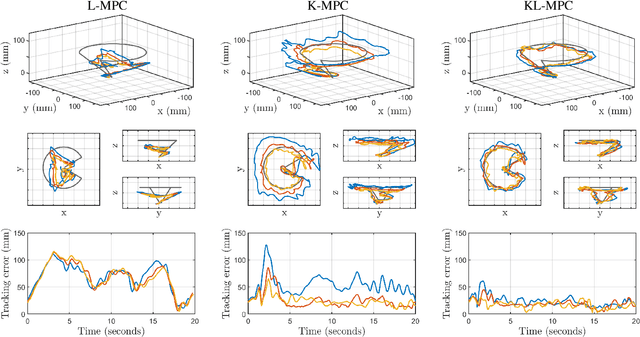
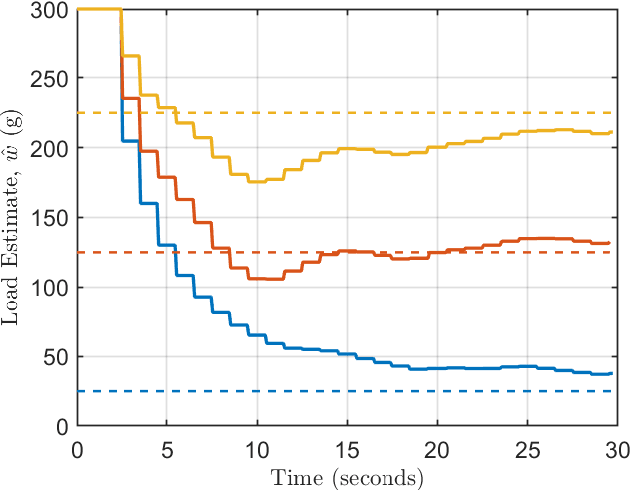
Controlling soft continuum manipulator arms is difficult due to their infinite degrees of freedom, nonlinear material properties, and large deflections under loading. This paper presents a data-driven approach to identifying soft manipulator models that enables consistent control under variable loading conditions. This is achieved by incorporating loads into a linear Koopman operator model as states and estimating their values online via an observer within the control loop. Using this approach, real-time, fully autonomous control of a pneumatically actuated soft continuum manipulator is achieved. In several trajectory following experiments, this controller is shown to be more accurate and precise than controllers based on models that are unable to explicitly account for loading. The manipulator also successfully performs pick and place of objects with unknown mass, demonstrating the efficacy of this approach in executing real-world manipulation tasks.