 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Clarity-Aware Dynamic Coverage with Gaussian Processes
Paper and Code
Mar 26, 2024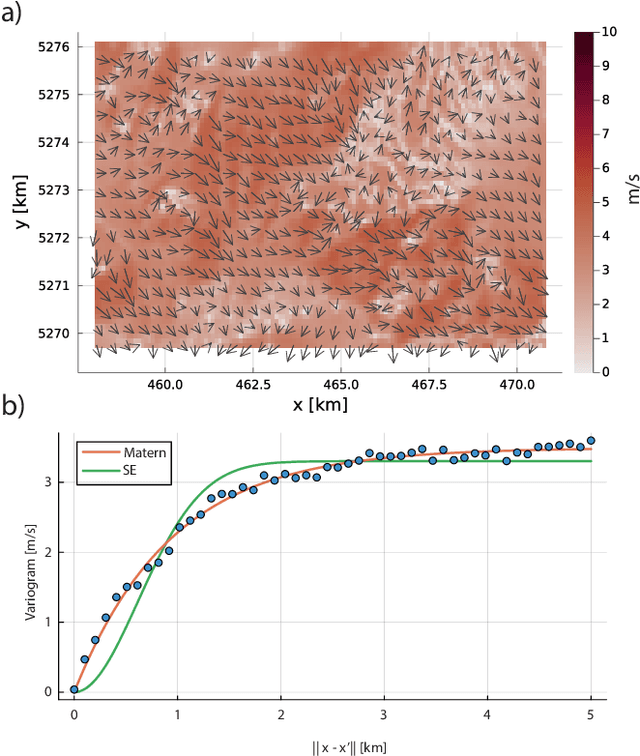
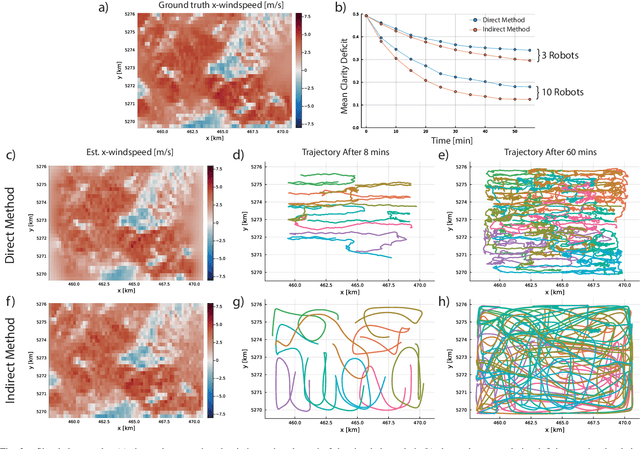
This paper presents two algorithms for multi-agent dynamic coverage in spatiotemporal environments, where the coverage algorithms are informed by the method of data assimilation. In particular, we show that by considering the information assimilation algorithm, here a Numerical Gaussian Process Kalman Filter, the influence of measurements taken at one position on the uncertainty of the estimate at another location can be computed. We use this relationship to propose new coverage algorithms. Furthermore, we show that the controllers naturally extend to the multi-agent context, allowing for a distributed-control central-information paradigm for multi-agent coverage. Finally, we demonstrate the algorithms through a realistic simulation of a team of UAVs collecting wind data over a region in Austria.