 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM Router: Prefill is All You Need
Mar 21, 2026LLMs often share comparable benchmark accuracies, but their complementary performance across task subsets suggests that an Oracle router--a theoretical selector with perfect foresight--can significantly surpass standalone model accuracy by navigating model-specific strengths. While current routers rely on fragile semantic signals, we propose using internal prefill activations via Encoder-Target Decoupling--a functional separation between the model providing the predictive signal (the Encoder) and the model whose performance is being estimated (the Target). This allows optimized heterogeneous pairing between unique encoders and target models. We utilize Fisher Separability (J) and Effective Dimensionality (d_eff) as mathematical probes to isolate optimal layer-wise signals, providing the predictive foundation for our SharedTrunkNet architecture. SharedTrunkNet captures up to 45.58% of the accuracy gap between the strongest standalone model and the Oracle while achieving 74.31% cost savings relative to the highest-cost model.
$(RSA)^2$: A Rhetorical-Strategy-Aware Rational Speech Act Framework for Figurative Language Understanding
Jun 10, 2025Figurative language (e.g., irony, hyperbole, understatement) is ubiquitous in human communication, resulting in utterances where the literal and the intended meanings do not match. The Rational Speech Act (RSA) framework, which explicitly models speaker intentions, is the most widespread theory of probabilistic pragmatics, but existing implementations are either unable to account for figurative expressions or require modeling the implicit motivations for using figurative language (e.g., to express joy or annoyance) in a setting-specific way. In this paper, we introduce the Rhetorical-Strategy-Aware RSA $(RSA)^2$ framework which models figurative language use by considering a speaker's employed rhetorical strategy. We show that $(RSA)^2$ enables human-compatible interpretations of non-literal utterances without modeling a speaker's motivations for being non-literal. Combined with LLMs, it achieves state-of-the-art performance on the ironic split of PragMega+, a new irony interpretation dataset introduced in this study.
FB-OCC: 3D Occupancy Prediction based on Forward-Backward View Transformation
Jul 04, 2023This technical report summarizes the winning solution for the 3D Occupancy Prediction Challenge, which is held in conjunction with the CVPR 2023 Workshop on End-to-End Autonomous Driving and CVPR 23 Workshop on Vision-Centric Autonomous Driving Workshop. Our proposed solution FB-OCC builds upon FB-BEV, a cutting-edge camera-based bird's-eye view perception design using forward-backward projection. On top of FB-BEV, we further study novel designs and optimization tailored to the 3D occupancy prediction task, including joint depth-semantic pre-training, joint voxel-BEV representation, model scaling up, and effective post-processing strategies. These designs and optimization result in a state-of-the-art mIoU score of 54.19% on the nuScenes dataset, ranking the 1st place in the challenge track. Code and models will be released at: https://github.com/NVlabs/FB-BEV.
Surgical tool classification and localization: results and methods from the MICCAI 2022 SurgToolLoc challenge
May 11, 2023



The ability to automatically detect and track surgical instruments in endoscopic videos can enable transformational interventions. Assessing surgical performance and efficiency, identifying skilled tool use and choreography, and planning operational and logistical aspects of OR resources are just a few of the applications that could benefit. Unfortunately, obtaining the annotations needed to train machine learning models to identify and localize surgical tools is a difficult task. Annotating bounding boxes frame-by-frame is tedious and time-consuming, yet large amounts of data with a wide variety of surgical tools and surgeries must be captured for robust training. Moreover, ongoing annotator training is needed to stay up to date with surgical instrument innovation. In robotic-assisted surgery, however, potentially informative data like timestamps of instrument installation and removal can be programmatically harvested. The ability to rely on tool installation data alone would significantly reduce the workload to train robust tool-tracking models. With this motivation in mind we invited the surgical data science community to participate in the challenge, SurgToolLoc 2022. The goal was to leverage tool presence data as weak labels for machine learning models trained to detect tools and localize them in video frames with bounding boxes. We present the results of this challenge along with many of the team's efforts. We conclude by discussing these results in the broader context of machine learning and surgical data science. The training data used for this challenge consisting of 24,695 video clips with tool presence labels is also being released publicly and can be accessed at https://console.cloud.google.com/storage/browser/isi-surgtoolloc-2022.
Learning to Localize Temporal Events in Large-scale Video Data
Oct 25, 2019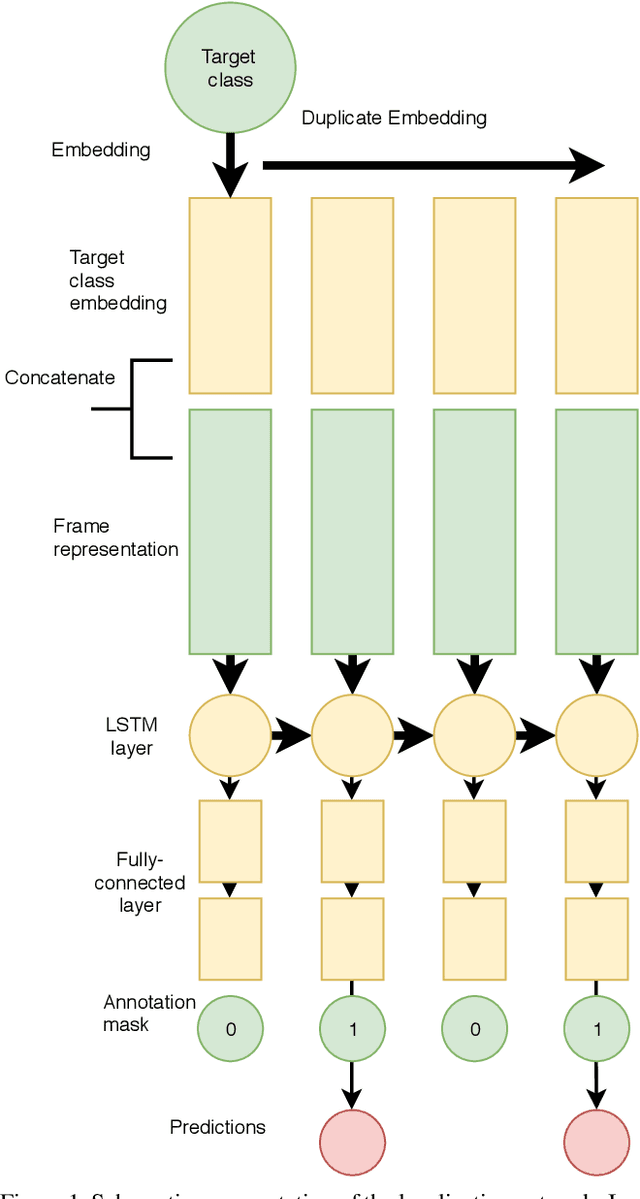
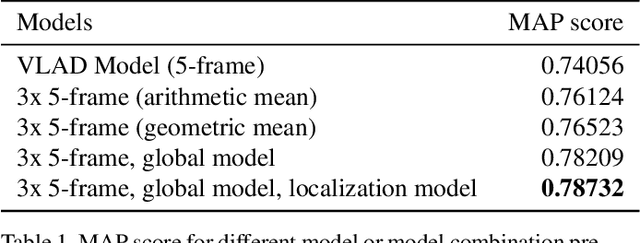
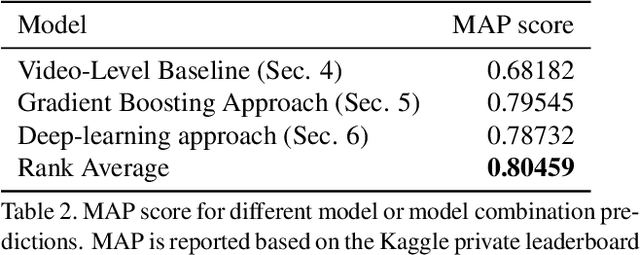
We address temporal localization of events in large-scale video data, in the context of the Youtube-8M Segments dataset. This emerging field within video recognition can enable applications to identify the precise time a specified event occurs in a video, which has broad implications for video search. To address this we present two separate approaches: (1) a gradient boosted decision tree model on a crafted dataset and (2) a combination of deep learning models based on frame-level data, video-level data, and a localization model. The combinations of these two approaches achieved 5th place in the 3rd Youtube-8M video recognition challenge.