 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFB-OCC: 3D Occupancy Prediction based on Forward-Backward View Transformation
Jul 04, 2023This technical report summarizes the winning solution for the 3D Occupancy Prediction Challenge, which is held in conjunction with the CVPR 2023 Workshop on End-to-End Autonomous Driving and CVPR 23 Workshop on Vision-Centric Autonomous Driving Workshop. Our proposed solution FB-OCC builds upon FB-BEV, a cutting-edge camera-based bird's-eye view perception design using forward-backward projection. On top of FB-BEV, we further study novel designs and optimization tailored to the 3D occupancy prediction task, including joint depth-semantic pre-training, joint voxel-BEV representation, model scaling up, and effective post-processing strategies. These designs and optimization result in a state-of-the-art mIoU score of 54.19% on the nuScenes dataset, ranking the 1st place in the challenge track. Code and models will be released at: https://github.com/NVlabs/FB-BEV.
Adaptive Graph Convolution for Point Cloud Analysis
Aug 19, 2021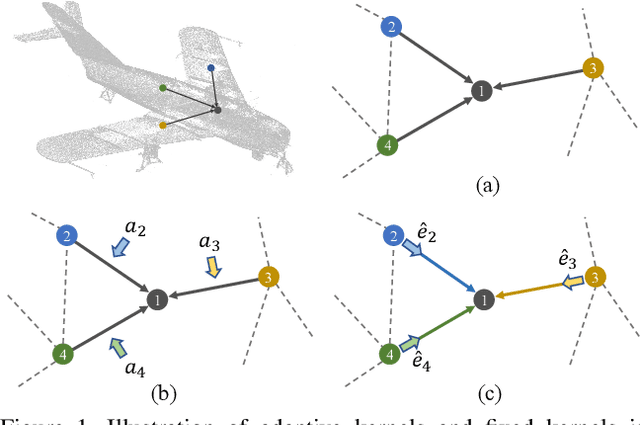
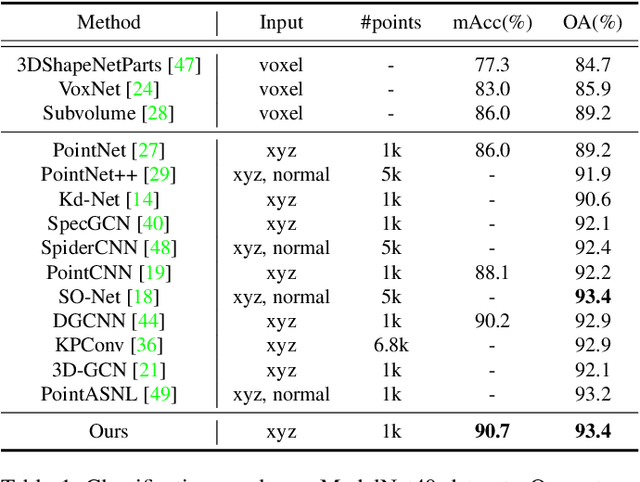


Convolution on 3D point clouds that generalized from 2D grid-like domains is widely researched yet far from perfect. The standard convolution characterises feature correspondences indistinguishably among 3D points, presenting an intrinsic limitation of poor distinctive feature learning. In this paper, we propose Adaptive Graph Convolution (AdaptConv) which generates adaptive kernels for points according to their dynamically learned features. Compared with using a fixed/isotropic kernel, AdaptConv improves the flexibility of point cloud convolutions, effectively and precisely capturing the diverse relations between points from different semantic parts. Unlike popular attentional weight schemes, the proposed AdaptConv implements the adaptiveness inside the convolution operation instead of simply assigning different weights to the neighboring points. Extensive qualitative and quantitative evaluations show that our method outperforms state-of-the-art point cloud classification and segmentation approaches on several benchmark datasets. Our code is available at https://github.com/hrzhou2/AdaptConv-master.