 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTechnology Readiness Levels for Machine Learning Systems
Jan 11, 2021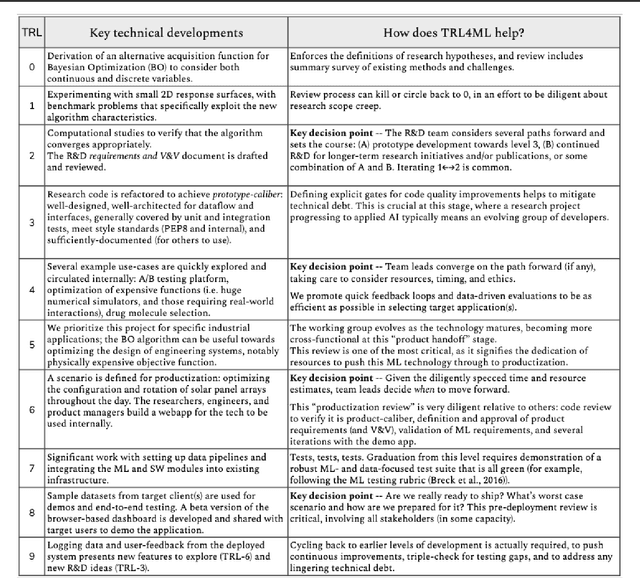
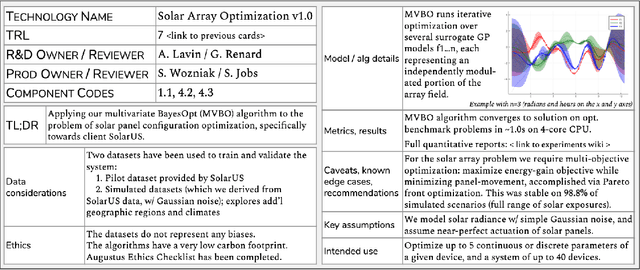
The development and deployment of machine learning (ML) systems can be executed easily with modern tools, but the process is typically rushed and means-to-an-end. The lack of diligence can lead to technical debt, scope creep and misaligned objectives, model misuse and failures, and expensive consequences. Engineering systems, on the other hand, follow well-defined processes and testing standards to streamline development for high-quality, reliable results. The extreme is spacecraft systems, where mission critical measures and robustness are ingrained in the development process. Drawing on experience in both spacecraft engineering and ML (from research through product across domain areas), we have developed a proven systems engineering approach for machine learning development and deployment. Our "Machine Learning Technology Readiness Levels" (MLTRL) framework defines a principled process to ensure robust, reliable, and responsible systems while being streamlined for ML workflows, including key distinctions from traditional software engineering. Even more, MLTRL defines a lingua franca for people across teams and organizations to work collaboratively on artificial intelligence and machine learning technologies. Here we describe the framework and elucidate it with several real world use-cases of developing ML methods from basic research through productization and deployment, in areas such as medical diagnostics, consumer computer vision, satellite imagery, and particle physics.
AAAI-2019 Workshop on Games and Simulations for Artificial Intelligence
Mar 06, 2019This volume represents the accepted submissions from the AAAI-2019 Workshop on Games and Simulations for Artificial Intelligence held on January 29, 2019 in Honolulu, Hawaii, USA. https://www.gamesim.ai
Obstacle Tower: A Generalization Challenge in Vision, Control, and Planning
Feb 04, 2019
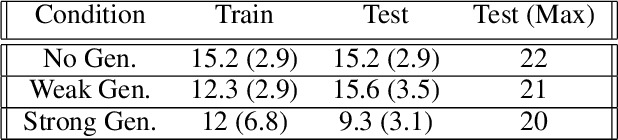
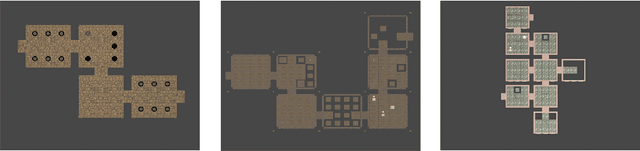
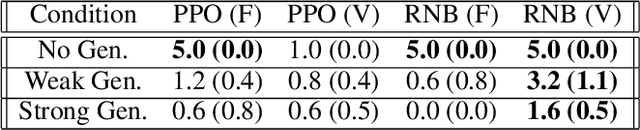
The rapid pace of research in Deep Reinforcement Learning has been driven by the presence of fast and challenging simulation environments. These environments often take the form of games; with tasks ranging from simple board games, to classic home console games, to modern strategy games. We propose a new benchmark called Obstacle Tower: a high visual fidelity, 3D, 3rd person, procedurally generated game environment. An agent in the Obstacle Tower must learn to solve both low-level control and high-level planning problems in tandem while learning from pixels and a sparse reward signal. Unlike other similar benchmarks such as the ALE, evaluation of agent performance in Obstacle Tower is based on an agent's ability to perform well on unseen instances of the environment. In this paper we outline the environment and provide a set of initial baseline results produced by current state-of-the-art Deep RL methods as well as human players. In all cases these algorithms fail to produce agents capable of performing anywhere near human level on a set of evaluations designed to test both memorization and generalization ability. As such, we believe that the Obstacle Tower has the potential to serve as a helpful Deep RL benchmark now and into the future.
Unity: A General Platform for Intelligent Agents
Sep 07, 2018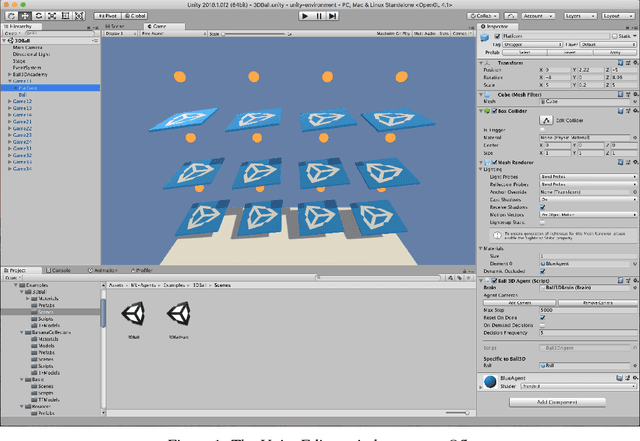
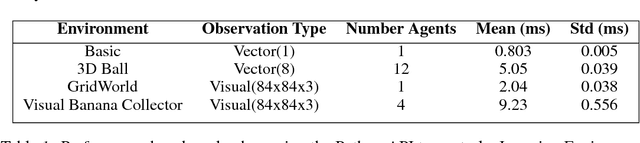
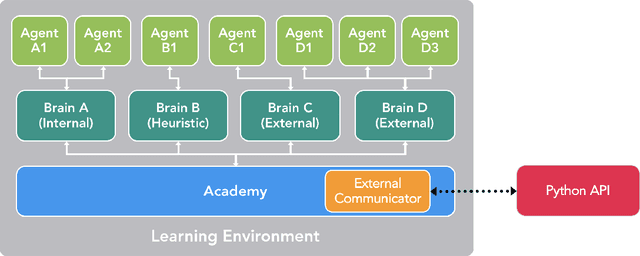
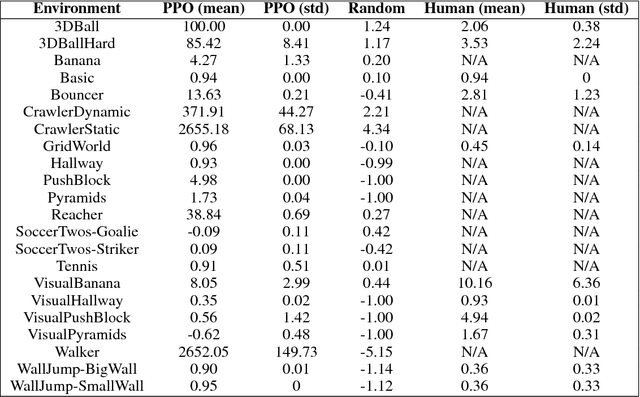
Recent advances in Deep Reinforcement Learning and Robotics have been driven by the presence of increasingly realistic and complex simulation environments. Many of the existing platforms, however, provide either unrealistic visuals, inaccurate physics, low task complexity, or a limited capacity for interaction among artificial agents. Furthermore, many platforms lack the ability to flexibly configure the simulation, hence turning the simulation environment into a black-box from the perspective of the learning system. Here we describe a new open source toolkit for creating and interacting with simulation environments using the Unity platform: Unity ML-Agents Toolkit. By taking advantage of Unity as a simulation platform, the toolkit enables the development of learning environments which are rich in sensory and physical complexity, provide compelling cognitive challenges, and support dynamic multi-agent interaction. We detail the platform design, communication protocol, set of example environments, and variety of training scenarios made possible via the toolkit.