 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnbiased Prevalence Estimation with Multicalibrated LLMs
Apr 23, 2026Estimating the prevalence of a category in a population using imperfect measurement devices (diagnostic tests, classifiers, or large language models) is fundamental to science, public health, and online trust and safety. Standard approaches correct for known device error rates but assume these rates remain stable across populations. We show this assumption fails under covariate shift and that multicalibration, which enforces calibration conditional on the input features rather than just on average, is sufficient for unbiased prevalence estimation under such shift. Standard calibration and quantification methods fail to provide this guarantee. Our work connects recent theoretical work on fairness to a longstanding measurement problem spanning nearly all academic disciplines. A simulation confirms that standard methods exhibit bias growing with shift magnitude, while a multicalibrated estimator maintains near-zero bias. While we focus the discussion mostly on LLMs, our theoretical results apply to any classification model. Two empirical applications -- estimating employment prevalence across U.S. states using the American Community Survey, and classifying political texts across four countries using an LLM -- demonstrate that multicalibration substantially reduces bias in practice, while highlighting that calibration data should cover the key feature dimensions along which target populations may differ.
On the Convergence of Multicalibration Gradient Boosting
Feb 06, 2026Multicalibration gradient boosting has recently emerged as a scalable method that empirically produces approximately multicalibrated predictors and has been deployed at web scale. Despite this empirical success, its convergence properties are not well understood. In this paper, we bridge the gap by providing convergence guarantees for multicalibration gradient boosting in regression with squared-error loss. We show that the magnitude of successive prediction updates decays at $O(1/\sqrt{T})$, which implies the same convergence rate bound for the multicalibration error over rounds. Under additional smoothness assumptions on the weak learners, this rate improves to linear convergence. We further analyze adaptive variants, showing local quadratic convergence of the training loss, and we study rescaling schemes that preserve convergence. Experiments on real-world datasets support our theory and clarify the regimes in which the method achieves fast convergence and strong multicalibration.
Billion-Scale Graph Foundation Models
Feb 04, 2026Graph-structured data underpins many critical applications. While foundation models have transformed language and vision via large-scale pretraining and lightweight adaptation, extending this paradigm to general, real-world graphs is challenging. In this work, we present Graph Billion- Foundation-Fusion (GraphBFF): the first end-to-end recipe for building billion-parameter Graph Foundation Models (GFMs) for arbitrary heterogeneous, billion-scale graphs. Central to the recipe is the GraphBFF Transformer, a flexible and scalable architecture designed for practical billion-scale GFMs. Using the GraphBFF, we present the first neural scaling laws for general graphs and show that loss decreases predictably as either model capacity or training data scales, depending on which factor is the bottleneck. The GraphBFF framework provides concrete methodologies for data batching, pretraining, and fine-tuning for building GFMs at scale. We demonstrate the effectiveness of the framework with an evaluation of a 1.4 billion-parameter GraphBFF Transformer pretrained on one billion samples. Across ten diverse, real-world downstream tasks on graphs unseen during training, spanning node- and link-level classification and regression, GraphBFF achieves remarkable zero-shot and probing performance, including in few-shot settings, with large margins of up to 31 PRAUC points. Finally, we discuss key challenges and open opportunities for making GFMs a practical and principled foundation for graph learning at industrial scale.
Multicalibration yields better matchings
Nov 14, 2025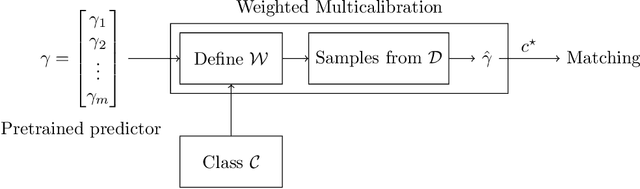
Consider the problem of finding the best matching in a weighted graph where we only have access to predictions of the actual stochastic weights, based on an underlying context. If the predictor is the Bayes optimal one, then computing the best matching based on the predicted weights is optimal. However, in practice, this perfect information scenario is not realistic. Given an imperfect predictor, a suboptimal decision rule may compensate for the induced error and thus outperform the standard optimal rule. In this paper, we propose multicalibration as a way to address this problem. This fairness notion requires a predictor to be unbiased on each element of a family of protected sets of contexts. Given a class of matching algorithms $\mathcal C$ and any predictor $γ$ of the edge-weights, we show how to construct a specific multicalibrated predictor $\hat γ$, with the following property. Picking the best matching based on the output of $\hat γ$ is competitive with the best decision rule in $\mathcal C$ applied onto the original predictor $γ$. We complement this result by providing sample complexity bounds.
Measuring multi-calibration
Jun 12, 2025A suitable scalar metric can help measure multi-calibration, defined as follows. When the expected values of observed responses are equal to corresponding predicted probabilities, the probabilistic predictions are known as "perfectly calibrated." When the predicted probabilities are perfectly calibrated simultaneously across several subpopulations, the probabilistic predictions are known as "perfectly multi-calibrated." In practice, predicted probabilities are seldom perfectly multi-calibrated, so a statistic measuring the distance from perfect multi-calibration is informative. A recently proposed metric for calibration, based on the classical Kuiper statistic, is a natural basis for a new metric of multi-calibration and avoids well-known problems of metrics based on binning or kernel density estimation. The newly proposed metric weights the contributions of different subpopulations in proportion to their signal-to-noise ratios; data analyses' ablations demonstrate that the metric becomes noisy when omitting the signal-to-noise ratios from the metric. Numerical examples on benchmark data sets illustrate the new metric.
Online Learning with Sublinear Best-Action Queries
Jul 23, 2024In online learning, a decision maker repeatedly selects one of a set of actions, with the goal of minimizing the overall loss incurred. Following the recent line of research on algorithms endowed with additional predictive features, we revisit this problem by allowing the decision maker to acquire additional information on the actions to be selected. In particular, we study the power of \emph{best-action queries}, which reveal beforehand the identity of the best action at a given time step. In practice, predictive features may be expensive, so we allow the decision maker to issue at most $k$ such queries. We establish tight bounds on the performance any algorithm can achieve when given access to $k$ best-action queries for different types of feedback models. In particular, we prove that in the full feedback model, $k$ queries are enough to achieve an optimal regret of $\Theta\left(\min\left\{\sqrt T, \frac Tk\right\}\right)$. This finding highlights the significant multiplicative advantage in the regret rate achievable with even a modest (sublinear) number $k \in \Omega(\sqrt{T})$ of queries. Additionally, we study the challenging setting in which the only available feedback is obtained during the time steps corresponding to the $k$ best-action queries. There, we provide a tight regret rate of $\Theta\left(\min\left\{\frac{T}{\sqrt k},\frac{T^2}{k^2}\right\}\right)$, which improves over the standard $\Theta\left(\frac{T}{\sqrt k}\right)$ regret rate for label efficient prediction for $k \in \Omega(T^{2/3})$.
On the convergence of loss and uncertainty-based active learning algorithms
Dec 21, 2023We study convergence rates of loss and uncertainty-based active learning algorithms under various assumptions. First, we provide a set of conditions under which a convergence rate guarantee holds, and use this for linear classifiers and linearly separable datasets to show convergence rate guarantees for loss-based sampling and different loss functions. Second, we provide a framework that allows us to derive convergence rate bounds for loss-based sampling by deploying known convergence rate bounds for stochastic gradient descent algorithms. Third, and last, we propose an active learning algorithm that combines sampling of points and stochastic Polyak's step size. We show a condition on the sampling that ensures a convergence rate guarantee for this algorithm for smooth convex loss functions. Our numerical results demonstrate efficiency of our proposed algorithm.
Bandits for Online Calibration: An Application to Content Moderation on Social Media Platforms
Nov 11, 2022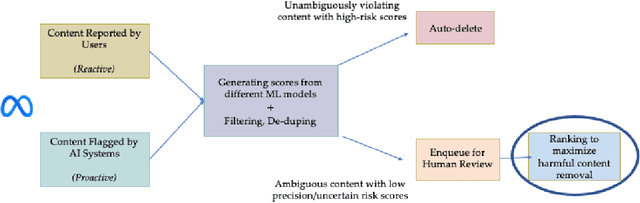
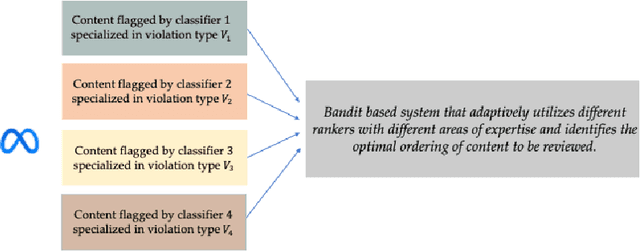
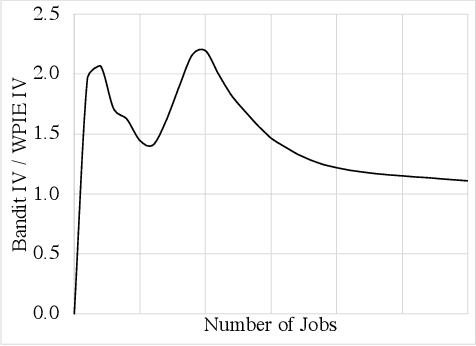
We describe the current content moderation strategy employed by Meta to remove policy-violating content from its platforms. Meta relies on both handcrafted and learned risk models to flag potentially violating content for human review. Our approach aggregates these risk models into a single ranking score, calibrating them to prioritize more reliable risk models. A key challenge is that violation trends change over time, affecting which risk models are most reliable. Our system additionally handles production challenges such as changing risk models and novel risk models. We use a contextual bandit to update the calibration in response to such trends. Our approach increases Meta's top-line metric for measuring the effectiveness of its content moderation strategy by 13%.