 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Realistic Arm Movements in Reinforcement Learning: A Quantitative Comparison of Reward Terms and Task Requirements
Feb 21, 2024



The mimicking of human-like arm movement characteristics involves the consideration of three factors during control policy synthesis: (a) chosen task requirements, (b) inclusion of noise during movement execution and (c) chosen optimality principles. Previous studies showed that when considering these factors (a-c) individually, it is possible to synthesize arm movements that either kinematically match the experimental data or reproduce the stereotypical triphasic muscle activation pattern. However, to date no quantitative comparison has been made on how realistic the arm movement generated by each factor is; as well as whether a partial or total combination of all factors results in arm movements with human-like kinematic characteristics and a triphasic muscle pattern. To investigate this, we used reinforcement learning to learn a control policy for a musculoskeletal arm model, aiming to discern which combination of factors (a-c) results in realistic arm movements according to four frequently reported stereotypical characteristics. Our findings indicate that incorporating velocity and acceleration requirements into the reaching task, employing reward terms that encourage minimization of mechanical work, hand jerk, and control effort, along with the inclusion of noise during movement, leads to the emergence of realistic human arm movements in reinforcement learning. We expect that the gained insights will help in the future to better predict desired arm movements and corrective forces in wearable assistive devices.
Natural and Robust Walking using Reinforcement Learning without Demonstrations in High-Dimensional Musculoskeletal Models
Sep 07, 2023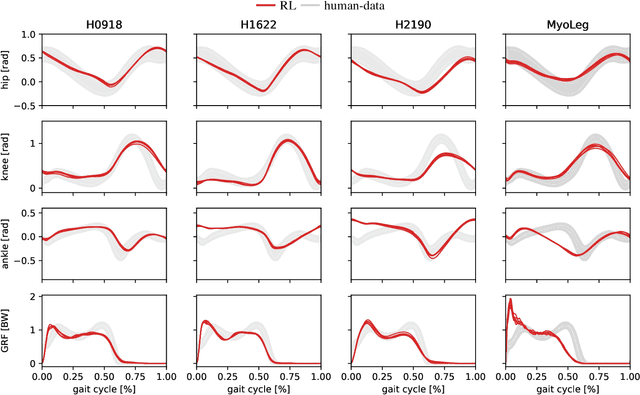
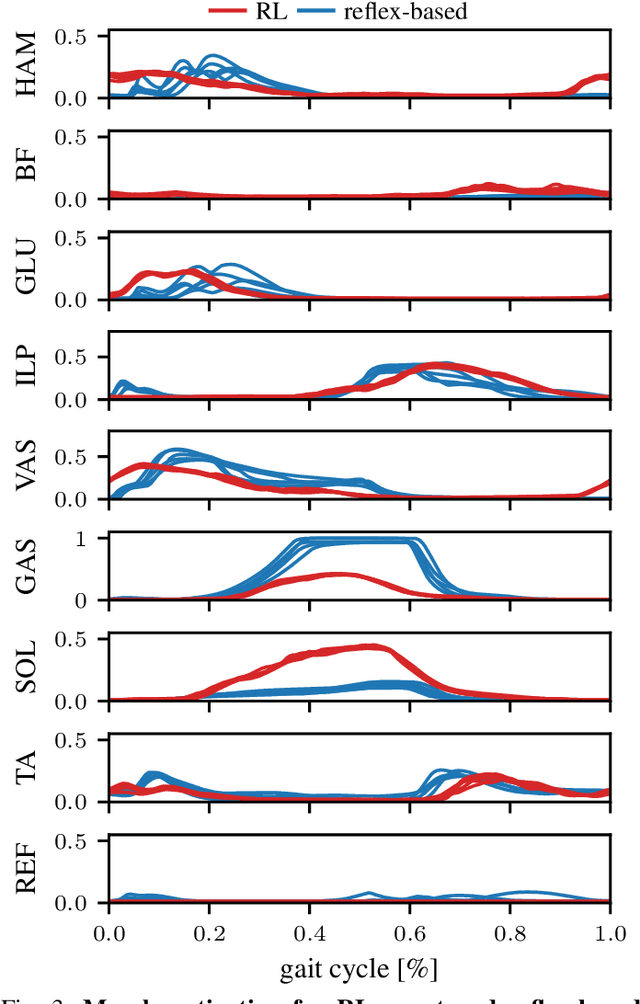
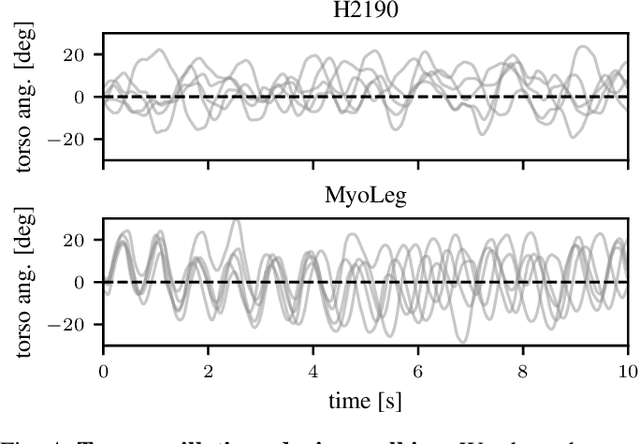

Humans excel at robust bipedal walking in complex natural environments. In each step, they adequately tune the interaction of biomechanical muscle dynamics and neuronal signals to be robust against uncertainties in ground conditions. However, it is still not fully understood how the nervous system resolves the musculoskeletal redundancy to solve the multi-objective control problem considering stability, robustness, and energy efficiency. In computer simulations, energy minimization has been shown to be a successful optimization target, reproducing natural walking with trajectory optimization or reflex-based control methods. However, these methods focus on particular motions at a time and the resulting controllers are limited when compensating for perturbations. In robotics, reinforcement learning~(RL) methods recently achieved highly stable (and efficient) locomotion on quadruped systems, but the generation of human-like walking with bipedal biomechanical models has required extensive use of expert data sets. This strong reliance on demonstrations often results in brittle policies and limits the application to new behaviors, especially considering the potential variety of movements for high-dimensional musculoskeletal models in 3D. Achieving natural locomotion with RL without sacrificing its incredible robustness might pave the way for a novel approach to studying human walking in complex natural environments. Videos: https://sites.google.com/view/naturalwalkingrl
Learning with Muscles: Benefits for Data-Efficiency and Robustness in Anthropomorphic Tasks
Jul 08, 2022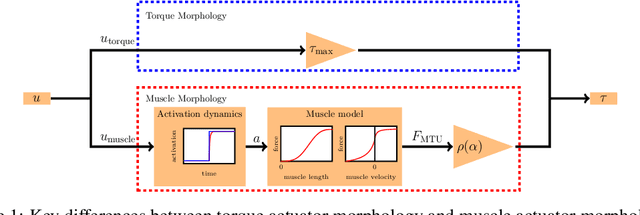
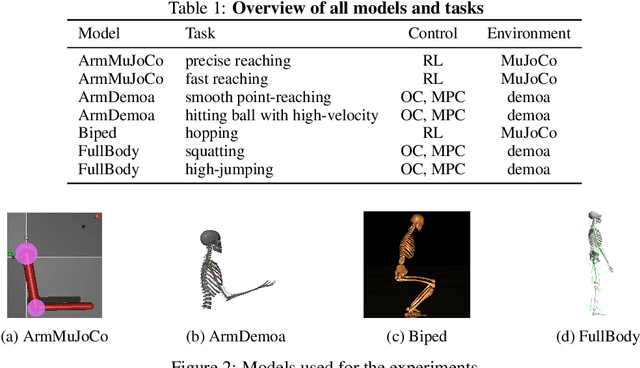
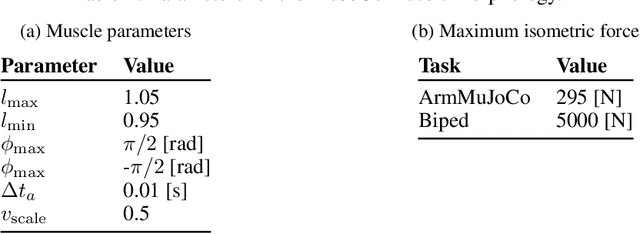
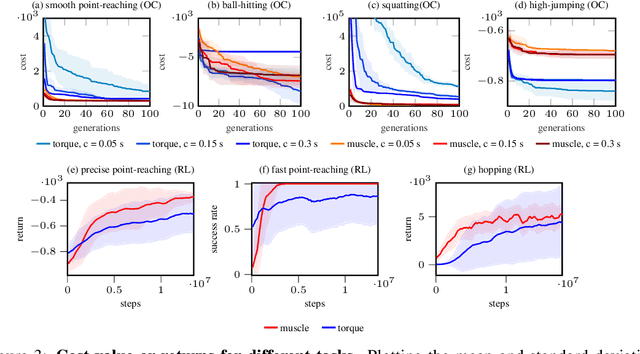
Humans are able to outperform robots in terms of robustness, versatility, and learning of new tasks in a wide variety of movements. We hypothesize that highly nonlinear muscle dynamics play a large role in providing inherent stability, which is favorable to learning. While recent advances have been made in applying modern learning techniques to muscle-actuated systems both in simulation as well as in robotics, so far, no detailed analysis has been performed to show the benefits of muscles in this setting. Our study closes this gap by investigating core robotics challenges and comparing the performance of different actuator morphologies in terms of data-efficiency, hyperparameter sensitivity, and robustness.
Effective Viscous Damping Enables Morphological Computation in Legged Locomotion
Jun 06, 2020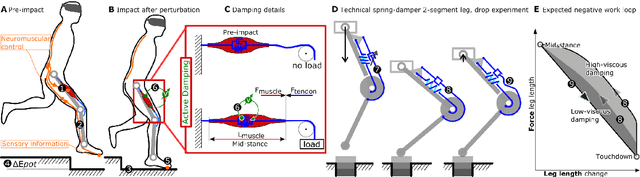
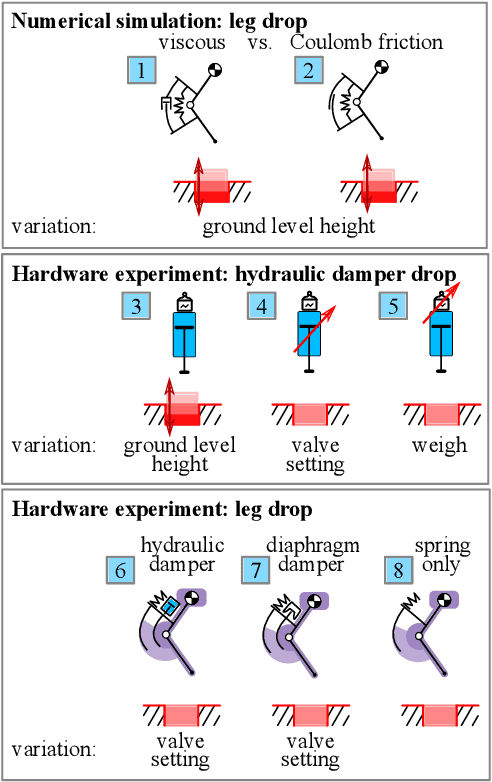
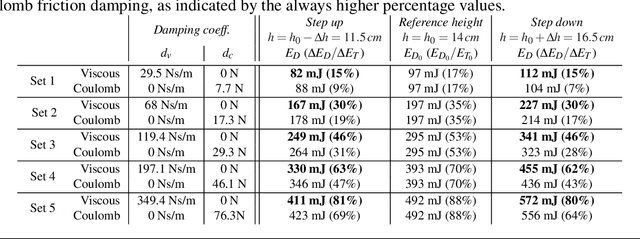
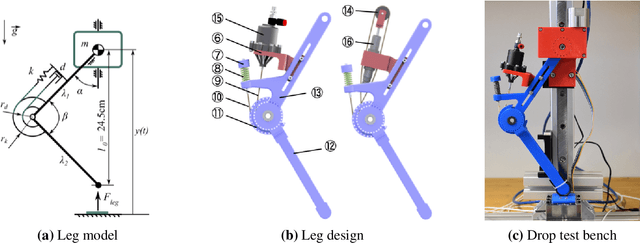
Muscle models and animal observations suggest that physical damping is beneficial for stabilization. Still, only a few implementations of mechanical damping exist in compliant robotic legged locomotion. It remains unclear how physical damping can be exploited for locomotion tasks, while its advantages as sensor-free, adaptive force- and negative work-producing actuators are promising. In a simplified numerical leg model, we studied the energy dissipation from viscous and Coulomb damping during vertical drops with ground-level perturbations. A parallel spring-damper is engaged between touch-down and mid-stance, and its damper auto-disengages during mid-stance and takeoff. Our simulations indicate that an adjustable and viscous damper is desired. In hardware we explored effective viscous damping and adjustability and quantified the dissipated energy. We tested two mechanical, leg-mounted damping mechanisms; a commercial hydraulic damper, and a custom-made pneumatic damper. The pneumatic damper exploits a rolling diaphragm with an adjustable orifice, minimizing Coulomb damping effects while permitting adjustable resistance. Experimental results show that the leg-mounted, hydraulic damper exhibits the most effective viscous damping. Adjusting the orifice setting did not result in substantial changes of dissipated energy per drop, unlike adjusting damping parameters in the numerical model. Consequently, we also emphasize the importance of characterizing physical dampers during real legged impacts to evaluate their effectiveness for compliant legged locomotion.
Evaluating Morphological Computation in Muscle and DC-motor Driven Models of Human Hopping
Dec 11, 2015
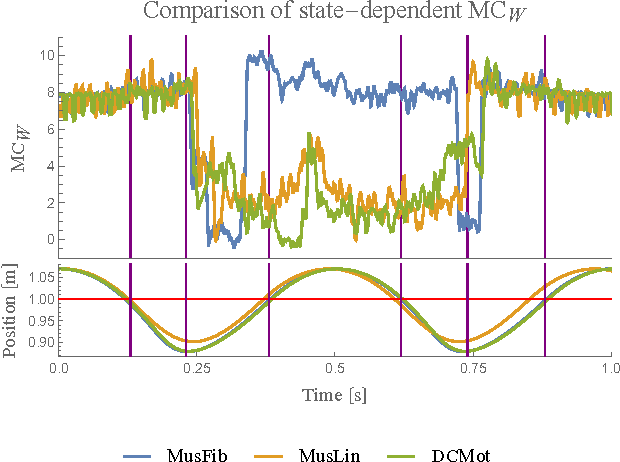

In the context of embodied artificial intelligence, morphological computation refers to processes which are conducted by the body (and environment) that otherwise would have to be performed by the brain. Exploiting environmental and morphological properties is an important feature of embodied systems. The main reason is that it allows to significantly reduce the controller complexity. An important aspect of morphological computation is that it cannot be assigned to an embodied system per se, but that it is, as we show, behavior- and state-dependent. In this work, we evaluate two different measures of morphological computation that can be applied in robotic systems and in computer simulations of biological movement. As an example, these measures were evaluated on muscle and DC-motor driven hopping models. We show that a state-dependent analysis of the hopping behaviors provides additional insights that cannot be gained from the averaged measures alone. This work includes algorithms and computer code for the measures.