 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Realistic Arm Movements in Reinforcement Learning: A Quantitative Comparison of Reward Terms and Task Requirements
Feb 21, 2024



The mimicking of human-like arm movement characteristics involves the consideration of three factors during control policy synthesis: (a) chosen task requirements, (b) inclusion of noise during movement execution and (c) chosen optimality principles. Previous studies showed that when considering these factors (a-c) individually, it is possible to synthesize arm movements that either kinematically match the experimental data or reproduce the stereotypical triphasic muscle activation pattern. However, to date no quantitative comparison has been made on how realistic the arm movement generated by each factor is; as well as whether a partial or total combination of all factors results in arm movements with human-like kinematic characteristics and a triphasic muscle pattern. To investigate this, we used reinforcement learning to learn a control policy for a musculoskeletal arm model, aiming to discern which combination of factors (a-c) results in realistic arm movements according to four frequently reported stereotypical characteristics. Our findings indicate that incorporating velocity and acceleration requirements into the reaching task, employing reward terms that encourage minimization of mechanical work, hand jerk, and control effort, along with the inclusion of noise during movement, leads to the emergence of realistic human arm movements in reinforcement learning. We expect that the gained insights will help in the future to better predict desired arm movements and corrective forces in wearable assistive devices.
Learning with Muscles: Benefits for Data-Efficiency and Robustness in Anthropomorphic Tasks
Jul 08, 2022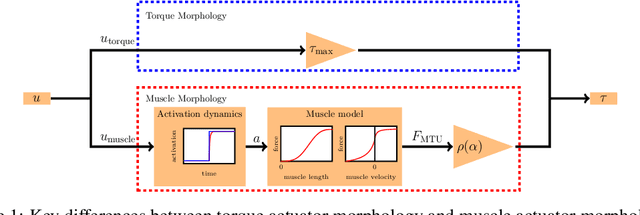
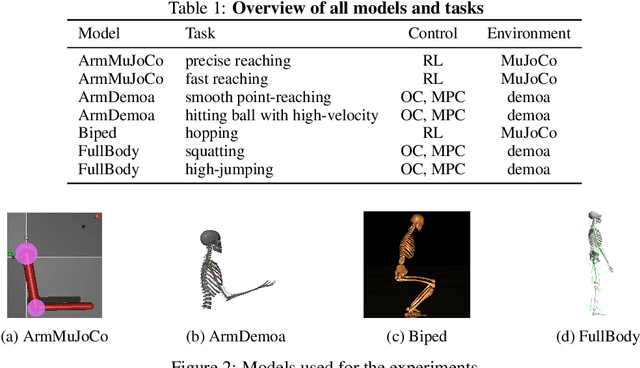
Humans are able to outperform robots in terms of robustness, versatility, and learning of new tasks in a wide variety of movements. We hypothesize that highly nonlinear muscle dynamics play a large role in providing inherent stability, which is favorable to learning. While recent advances have been made in applying modern learning techniques to muscle-actuated systems both in simulation as well as in robotics, so far, no detailed analysis has been performed to show the benefits of muscles in this setting. Our study closes this gap by investigating core robotics challenges and comparing the performance of different actuator morphologies in terms of data-efficiency, hyperparameter sensitivity, and robustness.