 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSlack-based tunable damping leads to a trade-off between robustness and efficiency in legged locomotion
Dec 01, 2022Animals run robustly in diverse terrain. This locomotion robustness is puzzling because axon conduction velocity is limited to a few ten meters per second. If reflex loops deliver sensory information with significant delays, one would expect a destabilizing effect on sensorimotor control. Hence, an alternative explanation describes a hierarchical structure of low-level adaptive mechanics and high-level sensorimotor control to help mitigate the effects of transmission delays. Motivated by the concept of an adaptive mechanism triggering an immediate response, we developed a tunable physical damper system. Our mechanism combines a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation. We characterize the slack damper mechanism mounted to a legged robot controlled in open-loop mode. The robot hops vertically and planar over varying terrains and perturbations. During forward hopping, slack-based damping improves faster perturbation recovery (up to 170%) at higher energetic cost (27%). The tunable slack mechanism auto-engages the damper during perturbations, leading to a perturbation-trigger damping, improving robustness at minimum energetic cost. With the results from the slack damper mechanism, we propose a new functional interpretation of animals' redundant muscle tendons as tunable dampers.
Effective Viscous Damping Enables Morphological Computation in Legged Locomotion
Jun 06, 2020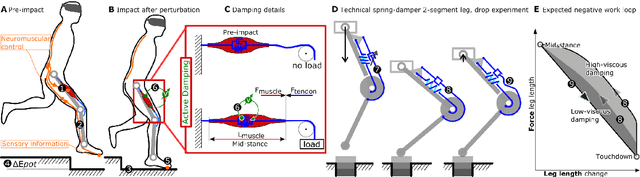
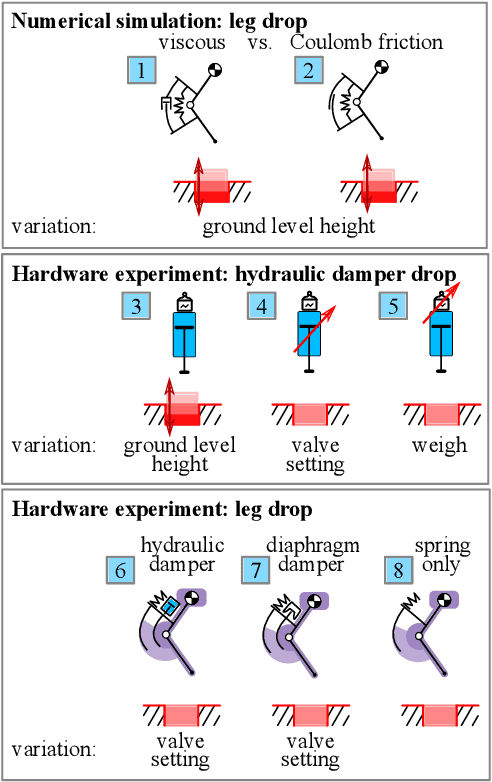
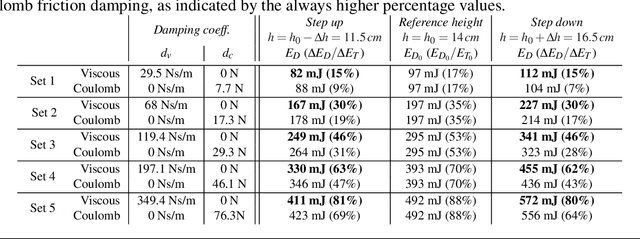
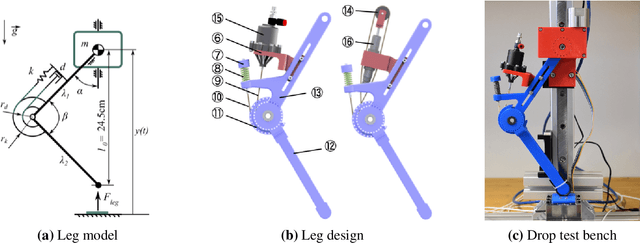
Muscle models and animal observations suggest that physical damping is beneficial for stabilization. Still, only a few implementations of mechanical damping exist in compliant robotic legged locomotion. It remains unclear how physical damping can be exploited for locomotion tasks, while its advantages as sensor-free, adaptive force- and negative work-producing actuators are promising. In a simplified numerical leg model, we studied the energy dissipation from viscous and Coulomb damping during vertical drops with ground-level perturbations. A parallel spring-damper is engaged between touch-down and mid-stance, and its damper auto-disengages during mid-stance and takeoff. Our simulations indicate that an adjustable and viscous damper is desired. In hardware we explored effective viscous damping and adjustability and quantified the dissipated energy. We tested two mechanical, leg-mounted damping mechanisms; a commercial hydraulic damper, and a custom-made pneumatic damper. The pneumatic damper exploits a rolling diaphragm with an adjustable orifice, minimizing Coulomb damping effects while permitting adjustable resistance. Experimental results show that the leg-mounted, hydraulic damper exhibits the most effective viscous damping. Adjusting the orifice setting did not result in substantial changes of dissipated energy per drop, unlike adjusting damping parameters in the numerical model. Consequently, we also emphasize the importance of characterizing physical dampers during real legged impacts to evaluate their effectiveness for compliant legged locomotion.