 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Decision Horizons for Constrained Reinforcement Learning
Feb 04, 2026Constrained Markov decision processes (CMDPs) provide a principled model for handling constraints, such as safety and other auxiliary objectives, in reinforcement learning. The common approach of using additive-cost constraints and dual variables often hinders off-policy scalability. We propose a Control as Inference formulation based on stochastic decision horizons, where constraint violations attenuate reward contributions and shorten the effective planning horizon via state-action-dependent continuation. This yields survival-weighted objectives that remain replay-compatible for off-policy actor-critic learning. We propose two violation semantics, absorbing and virtual termination, that share the same survival-weighted return but result in distinct optimization structures that lead to SAC/MPO-style policy improvement. Experiments demonstrate improved sample efficiency and favorable return-violation trade-offs on standard benchmarks. Moreover, MPO with virtual termination (VT-MPO) scales effectively to our high-dimensional musculoskeletal Hyfydy setup.
When to Act: Calibrated Confidence for Reliable Human Intention Prediction in Assistive Robotics
Jan 08, 2026Assistive devices must determine both what a user intends to do and how reliable that prediction is before providing support. We introduce a safety-critical triggering framework based on calibrated probabilities for multimodal next-action prediction in Activities of Daily Living. Raw model confidence often fails to reflect true correctness, posing a safety risk. Post-hoc calibration aligns predicted confidence with empirical reliability and reduces miscalibration by about an order of magnitude without affecting accuracy. The calibrated confidence drives a simple ACT/HOLD rule that acts only when reliability is high and withholds assistance otherwise. This turns the confidence threshold into a quantitative safety parameter for assisted actions and enables verifiable behavior in an assistive control loop.
HOIGaze: Gaze Estimation During Hand-Object Interactions in Extended Reality Exploiting Eye-Hand-Head Coordination
Apr 28, 2025We present HOIGaze - a novel learning-based approach for gaze estimation during hand-object interactions (HOI) in extended reality (XR). HOIGaze addresses the challenging HOI setting by building on one key insight: The eye, hand, and head movements are closely coordinated during HOIs and this coordination can be exploited to identify samples that are most useful for gaze estimator training - as such, effectively denoising the training data. This denoising approach is in stark contrast to previous gaze estimation methods that treated all training samples as equal. Specifically, we propose: 1) a novel hierarchical framework that first recognises the hand currently visually attended to and then estimates gaze direction based on the attended hand; 2) a new gaze estimator that uses cross-modal Transformers to fuse head and hand-object features extracted using a convolutional neural network and a spatio-temporal graph convolutional network; and 3) a novel eye-head coordination loss that upgrades training samples belonging to the coordinated eye-head movements. We evaluate HOIGaze on the HOT3D and Aria digital twin (ADT) datasets and show that it significantly outperforms state-of-the-art methods, achieving an average improvement of 15.6% on HOT3D and 6.0% on ADT in mean angular error. To demonstrate the potential of our method, we further report significant performance improvements for the sample downstream task of eye-based activity recognition on ADT. Taken together, our results underline the significant information content available in eye-hand-head coordination and, as such, open up an exciting new direction for learning-based gaze estimation.
HaHeAE: Learning Generalisable Joint Representations of Human Hand and Head Movements in Extended Reality
Oct 21, 2024



Human hand and head movements are the most pervasive input modalities in extended reality (XR) and are significant for a wide range of applications. However, prior works on hand and head modelling in XR only explored a single modality or focused on specific applications. We present HaHeAE - a novel self-supervised method for learning generalisable joint representations of hand and head movements in XR. At the core of our method is an autoencoder (AE) that uses a graph convolutional network-based semantic encoder and a diffusion-based stochastic encoder to learn the joint semantic and stochastic representations of hand-head movements. It also features a diffusion-based decoder to reconstruct the original signals. Through extensive evaluations on three public XR datasets, we show that our method 1) significantly outperforms commonly used self-supervised methods by up to 74.0% in terms of reconstruction quality and is generalisable across users, activities, and XR environments, 2) enables new applications, including interpretable hand-head cluster identification and variable hand-head movement generation, and 3) can serve as an effective feature extractor for downstream tasks. Together, these results demonstrate the effectiveness of our method and underline the potential of self-supervised methods for jointly modelling hand-head behaviours in extended reality.
HOIMotion: Forecasting Human Motion During Human-Object Interactions Using Egocentric 3D Object Bounding Boxes
Jul 02, 2024



We present HOIMotion - a novel approach for human motion forecasting during human-object interactions that integrates information about past body poses and egocentric 3D object bounding boxes. Human motion forecasting is important in many augmented reality applications but most existing methods have only used past body poses to predict future motion. HOIMotion first uses an encoder-residual graph convolutional network (GCN) and multi-layer perceptrons to extract features from body poses and egocentric 3D object bounding boxes, respectively. Our method then fuses pose and object features into a novel pose-object graph and uses a residual-decoder GCN to forecast future body motion. We extensively evaluate our method on the Aria digital twin (ADT) and MoGaze datasets and show that HOIMotion consistently outperforms state-of-the-art methods by a large margin of up to 8.7% on ADT and 7.2% on MoGaze in terms of mean per joint position error. Complementing these evaluations, we report a human study (N=20) that shows that the improvements achieved by our method result in forecasted poses being perceived as both more precise and more realistic than those of existing methods. Taken together, these results reveal the significant information content available in egocentric 3D object bounding boxes for human motion forecasting and the effectiveness of our method in exploiting this information.
GazeMotion: Gaze-guided Human Motion Forecasting
Mar 14, 2024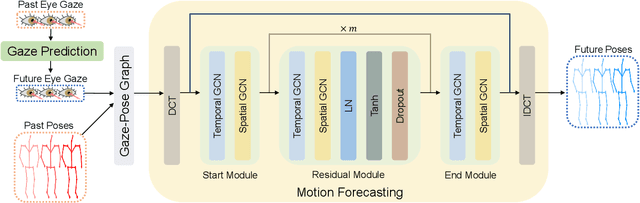
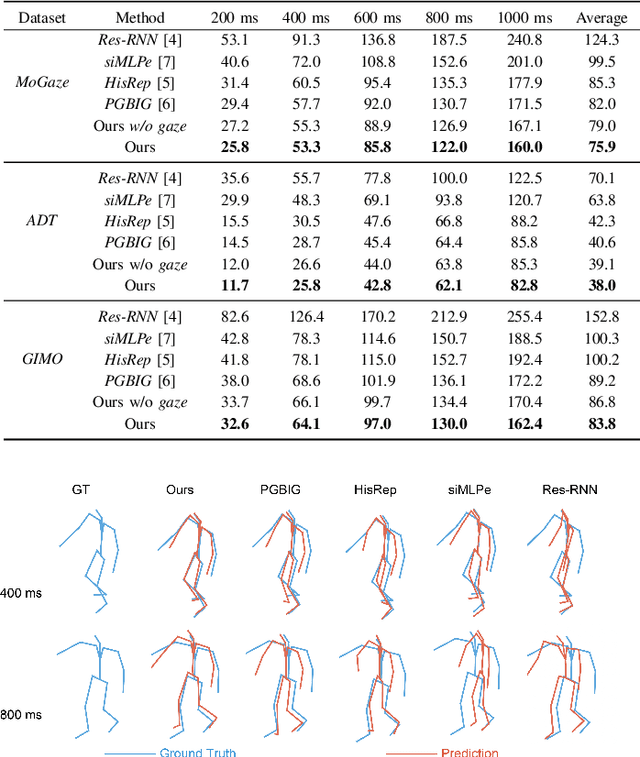
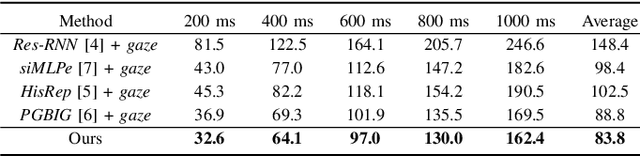
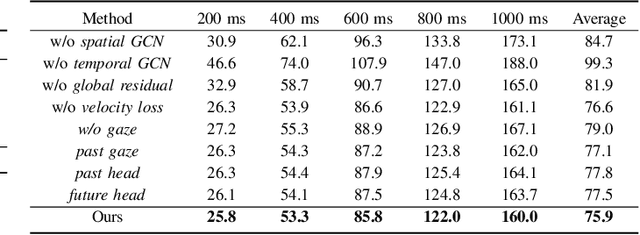
We present GazeMotion, a novel method for human motion forecasting that combines information on past human poses with human eye gaze. Inspired by evidence from behavioural sciences showing that human eye and body movements are closely coordinated, GazeMotion first predicts future eye gaze from past gaze, then fuses predicted future gaze and past poses into a gaze-pose graph, and finally uses a residual graph convolutional network to forecast body motion. We extensively evaluate our method on the MoGaze, ADT, and GIMO benchmark datasets and show that it outperforms state-of-the-art methods by up to 7.4% improvement in mean per joint position error. Using head direction as a proxy to gaze, our method still achieves an average improvement of 5.5%. We finally report an online user study showing that our method also outperforms prior methods in terms of perceived realism. These results show the significant information content available in eye gaze for human motion forecasting as well as the effectiveness of our method in exploiting this information.
Learning to Control Emulated Muscles in Real Robots: Towards Exploiting Bio-Inspired Actuator Morphology
Feb 08, 2024Recent studies have demonstrated the immense potential of exploiting muscle actuator morphology for natural and robust movement -- in simulation. A validation on real robotic hardware is yet missing. In this study, we emulate muscle actuator properties on hardware in real-time, taking advantage of modern and affordable electric motors. We demonstrate that our setup can emulate a simplified muscle model on a real robot while being controlled by a learned policy. We improve upon an existing muscle model by deriving a damping rule that ensures that the model is not only performant and stable but also tuneable for the real hardware. Our policies are trained by reinforcement learning entirely in simulation, where we show that previously reported benefits of muscles extend to the case of quadruped locomotion and hopping: the learned policies are more robust and exhibit more regular gaits. Finally, we confirm that the learned policies can be executed on real hardware and show that sim-to-real transfer with real-time emulated muscles on a quadruped robot is possible. These results show that artificial muscles can be highly beneficial actuators for future generations of robust legged robots.
Slack-based tunable damping leads to a trade-off between robustness and efficiency in legged locomotion
Dec 01, 2022Animals run robustly in diverse terrain. This locomotion robustness is puzzling because axon conduction velocity is limited to a few ten meters per second. If reflex loops deliver sensory information with significant delays, one would expect a destabilizing effect on sensorimotor control. Hence, an alternative explanation describes a hierarchical structure of low-level adaptive mechanics and high-level sensorimotor control to help mitigate the effects of transmission delays. Motivated by the concept of an adaptive mechanism triggering an immediate response, we developed a tunable physical damper system. Our mechanism combines a tendon with adjustable slackness connected to a physical damper. The slack damper allows adjustment of damping force, onset timing, effective stroke, and energy dissipation. We characterize the slack damper mechanism mounted to a legged robot controlled in open-loop mode. The robot hops vertically and planar over varying terrains and perturbations. During forward hopping, slack-based damping improves faster perturbation recovery (up to 170%) at higher energetic cost (27%). The tunable slack mechanism auto-engages the damper during perturbations, leading to a perturbation-trigger damping, improving robustness at minimum energetic cost. With the results from the slack damper mechanism, we propose a new functional interpretation of animals' redundant muscle tendons as tunable dampers.