 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact and dynamics of hate and counter speech online
Sep 18, 2020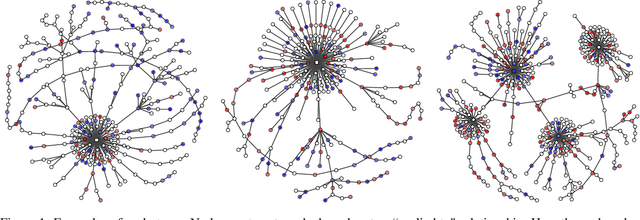
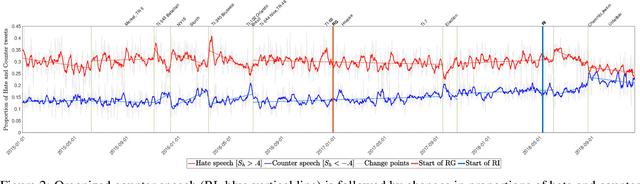
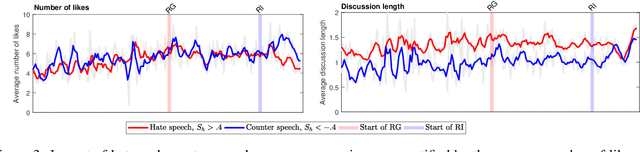
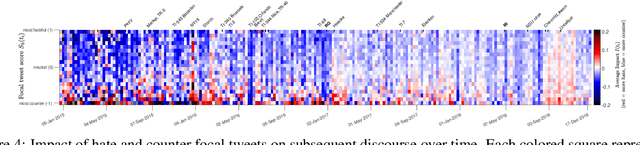
Citizen-generated counter speech is a promising way to fight hate speech and promote peaceful, non-polarized discourse. However, there is a lack of large-scale longitudinal studies of its effectiveness for reducing hate speech. We investigate the effectiveness of counter speech using several different macro- and micro-level measures of over 180,000 political conversations that took place on German Twitter over four years. We report on the dynamic interactions of hate and counter speech over time and provide insights into whether, as in `classic' bullying situations, organized efforts are more effective than independent individuals in steering online discourse. Taken together, our results build a multifaceted picture of the dynamics of hate and counter speech online. They suggest that organized hate speech produced changes in the public discourse. Counter speech, especially when organized, could help in curbing hate speech in online discussions.
Countering hate on social media: Large scale classification of hate and counter speech
Jun 05, 2020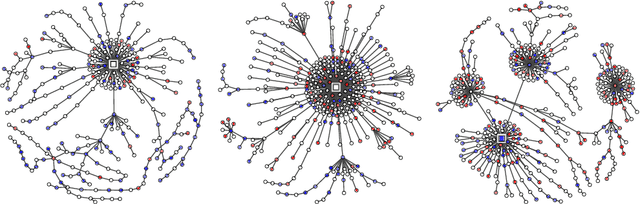
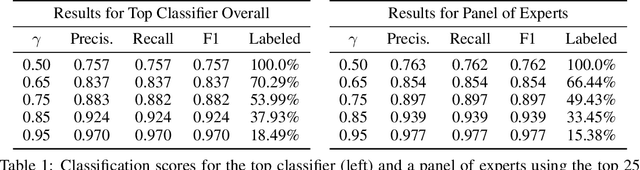
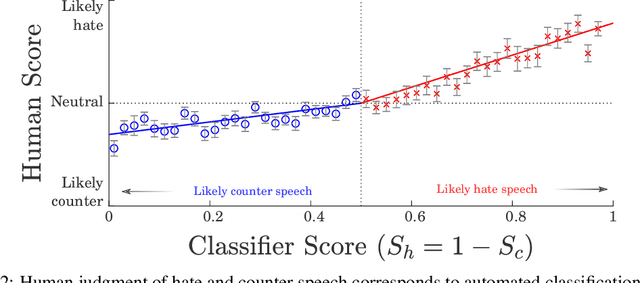
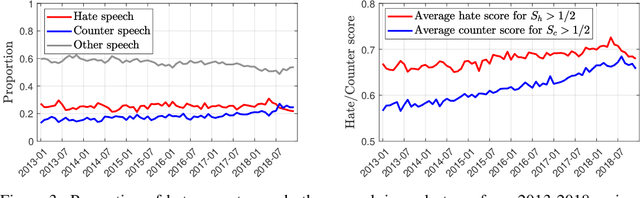
Hateful rhetoric is plaguing online discourse, fostering extreme societal movements and possibly giving rise to real-world violence. A potential solution to this growing global problem is citizen-generated counter speech where citizens actively engage in hate-filled conversations to attempt to restore civil non-polarized discourse. However, its actual effectiveness in curbing the spread of hatred is unknown and hard to quantify. One major obstacle to researching this question is a lack of large labeled data sets for training automated classifiers to identify counter speech. Here we made use of a unique situation in Germany where self-labeling groups engaged in organized online hate and counter speech. We used an ensemble learning algorithm which pairs a variety of paragraph embeddings with regularized logistic regression functions to classify both hate and counter speech in a corpus of millions of relevant tweets from these two groups. Our pipeline achieved macro F1 scores on out of sample balanced test sets ranging from 0.76 to 0.97---accuracy in line and even exceeding the state of the art. On thousands of tweets, we used crowdsourcing to verify that the judgments made by the classifier are in close alignment with human judgment. We then used the classifier to discover hate and counter speech in more than 135,000 fully-resolved Twitter conversations occurring from 2013 to 2018 and study their frequency and interaction. Altogether, our results highlight the potential of automated methods to evaluate the impact of coordinated counter speech in stabilizing conversations on social media.
NMODE --- Neuro-MODule Evolution
Jan 18, 2017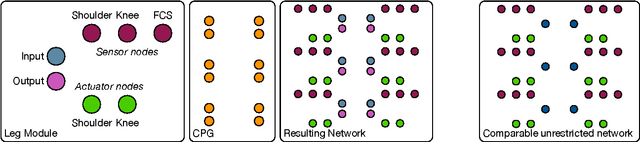

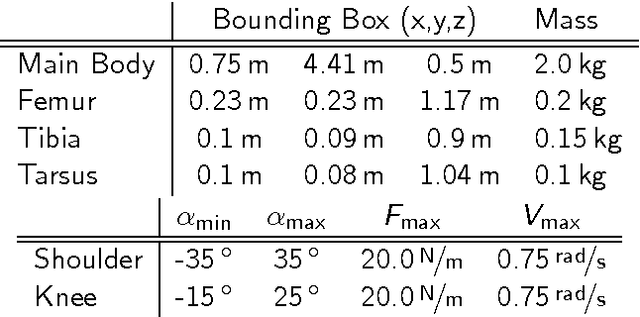
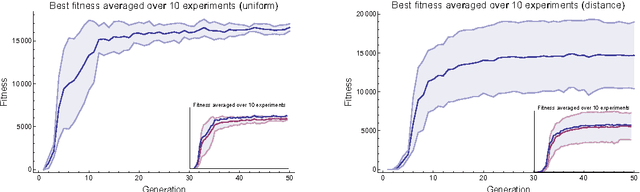
Modularisation, repetition, and symmetry are structural features shared by almost all biological neural networks. These features are very unlikely to be found by the means of structural evolution of artificial neural networks. This paper introduces NMODE, which is specifically designed to operate on neuro-modules. NMODE addresses a second problem in the context of evolutionary robotics, which is incremental evolution of complex behaviours for complex machines, by offering a way to interface neuro-modules. The scenario in mind is a complex walking machine, for which a locomotion module is evolved first, that is then extended by other modules in later stages. We show that NMODE is able to evolve a locomotion behaviour for a standard six-legged walking machine in approximately 10 generations and show how it can be used for incremental evolution of a complex walking machine. The entire source code used in this paper is publicly available through GitHub.
Information Theoretically Aided Reinforcement Learning for Embodied Agents
May 31, 2016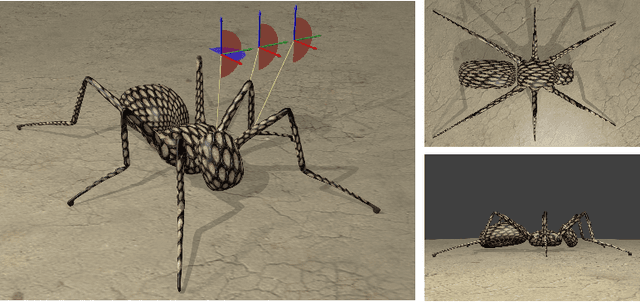
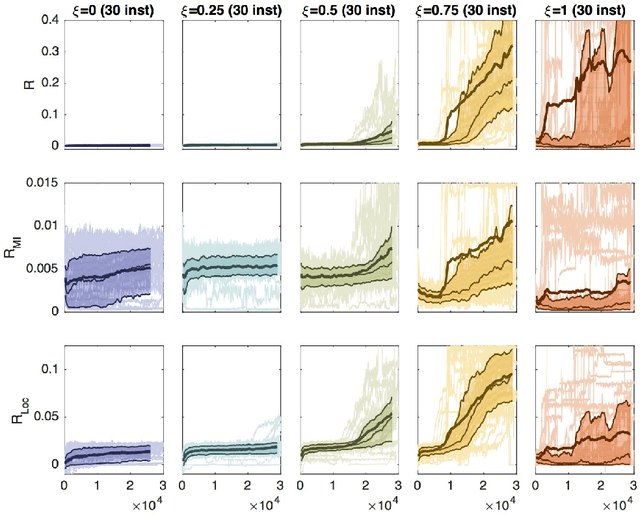
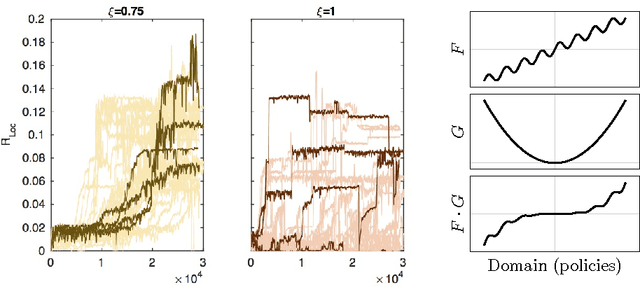
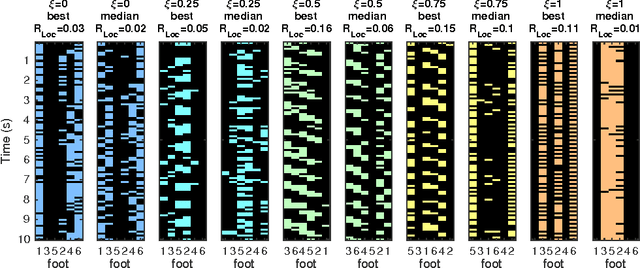
Reinforcement learning for embodied agents is a challenging problem. The accumulated reward to be optimized is often a very rugged function, and gradient methods are impaired by many local optimizers. We demonstrate, in an experimental setting, that incorporating an intrinsic reward can smoothen the optimization landscape while preserving the global optimizers of interest. We show that policy gradient optimization for locomotion in a complex morphology is significantly improved when supplementing the extrinsic reward by an intrinsic reward defined in terms of the mutual information of time consecutive sensor readings.
Geometry and Determinism of Optimal Stationary Control in Partially Observable Markov Decision Processes
Feb 13, 2016
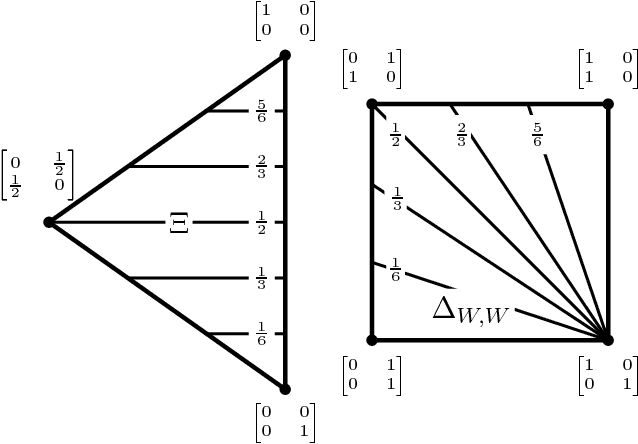
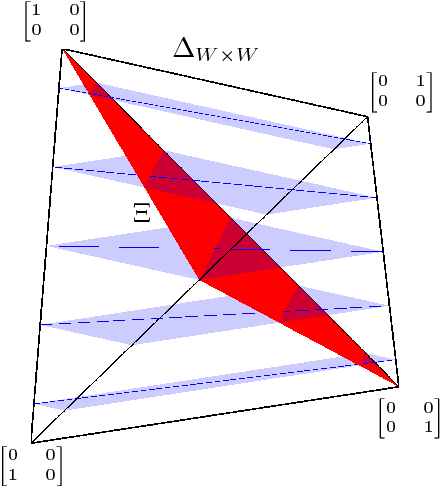
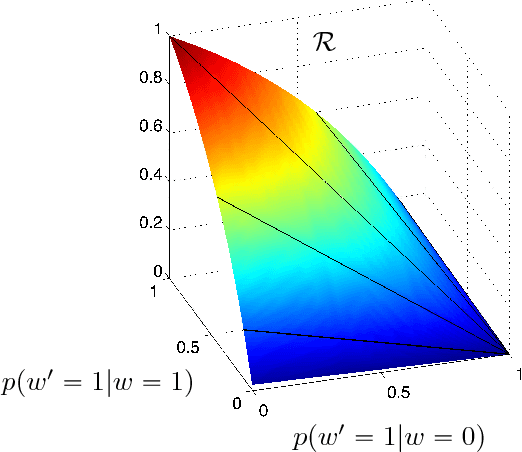
It is well known that for any finite state Markov decision process (MDP) there is a memoryless deterministic policy that maximizes the expected reward. For partially observable Markov decision processes (POMDPs), optimal memoryless policies are generally stochastic. We study the expected reward optimization problem over the set of memoryless stochastic policies. We formulate this as a constrained linear optimization problem and develop a corresponding geometric framework. We show that any POMDP has an optimal memoryless policy of limited stochasticity, which allows us to reduce the dimensionality of the search space. Experiments demonstrate that this approach enables better and faster convergence of the policy gradient on the evaluated systems.
Evaluating Morphological Computation in Muscle and DC-motor Driven Models of Human Hopping
Dec 11, 2015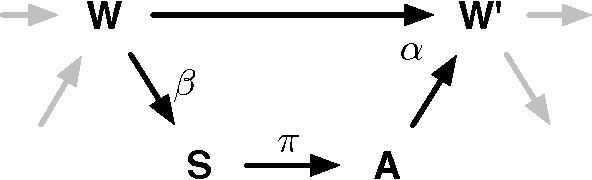
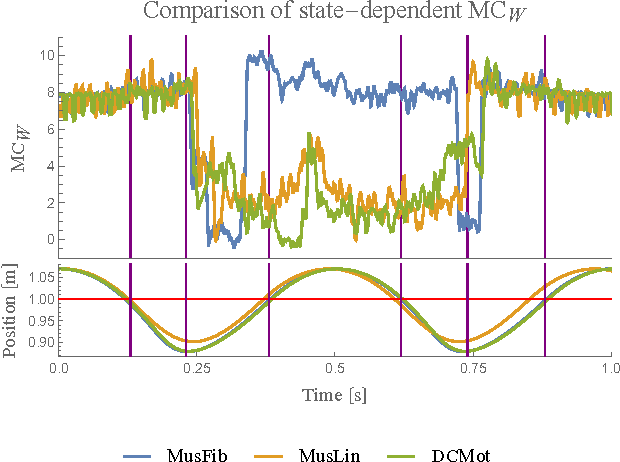

In the context of embodied artificial intelligence, morphological computation refers to processes which are conducted by the body (and environment) that otherwise would have to be performed by the brain. Exploiting environmental and morphological properties is an important feature of embodied systems. The main reason is that it allows to significantly reduce the controller complexity. An important aspect of morphological computation is that it cannot be assigned to an embodied system per se, but that it is, as we show, behavior- and state-dependent. In this work, we evaluate two different measures of morphological computation that can be applied in robotic systems and in computer simulations of biological movement. As an example, these measures were evaluated on muscle and DC-motor driven hopping models. We show that a state-dependent analysis of the hopping behaviors provides additional insights that cannot be gained from the averaged measures alone. This work includes algorithms and computer code for the measures.
Quantifying Morphological Computation based on an Information Decomposition of the Sensorimotor Loop
Mar 17, 2015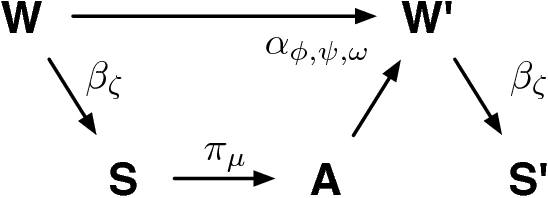
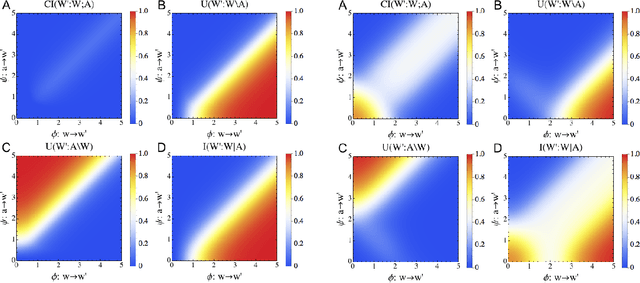
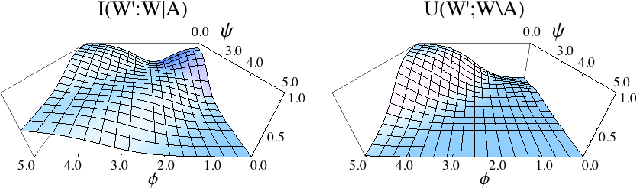
The question how an agent is affected by its embodiment has attracted growing attention in recent years. A new field of artificial intelligence has emerged, which is based on the idea that intelligence cannot be understood without taking into account embodiment. We believe that a formal approach to quantifying the embodiment's effect on the agent's behaviour is beneficial to the fields of artificial life and artificial intelligence. The contribution of an agent's body and environment to its behaviour is also known as morphological computation. Therefore, in this work, we propose a quantification of morphological computation, which is based on an information decomposition of the sensorimotor loop into shared, unique and synergistic information. In numerical simulation based on a formal representation of the sensorimotor loop, we show that the unique information of the body and environment is a good measure for morphological computation. The results are compared to our previously derived quantification of morphological computation.
Geometry and Expressive Power of Conditional Restricted Boltzmann Machines
Mar 12, 2015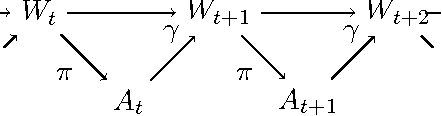

Conditional restricted Boltzmann machines are undirected stochastic neural networks with a layer of input and output units connected bipartitely to a layer of hidden units. These networks define models of conditional probability distributions on the states of the output units given the states of the input units, parametrized by interaction weights and biases. We address the representational power of these models, proving results their ability to represent conditional Markov random fields and conditional distributions with restricted supports, the minimal size of universal approximators, the maximal model approximation errors, and on the dimension of the set of representable conditional distributions. We contribute new tools for investigating conditional probability models, which allow us to improve the results that can be derived from existing work on restricted Boltzmann machine probability models.
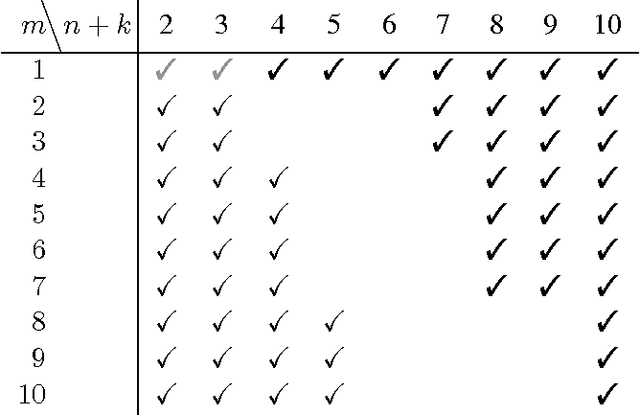
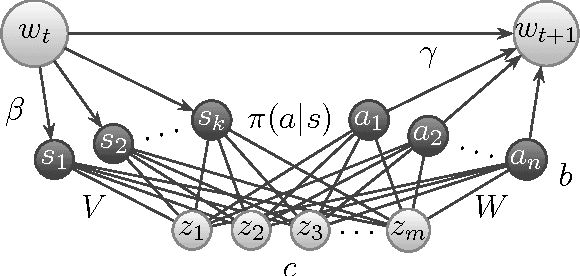
A Theory of Cheap Control in Embodied Systems
Nov 15, 2014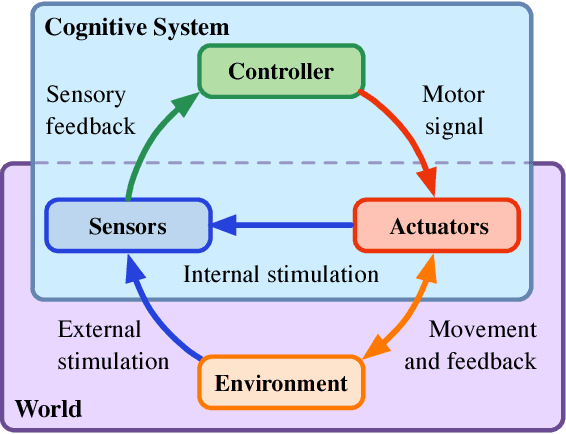

We present a framework for designing cheap control architectures for embodied agents. Our derivation is guided by the classical problem of universal approximation, whereby we explore the possibility of exploiting the agent's embodiment for a new and more efficient universal approximation of behaviors generated by sensorimotor control. This embodied universal approximation is compared with the classical non-embodied universal approximation. To exemplify our approach, we present a detailed quantitative case study for policy models defined in terms of conditional restricted Boltzmann machines. In contrast to non-embodied universal approximation, which requires an exponential number of parameters, in the embodied setting we are able to generate all possible behaviors with a drastically smaller model, thus obtaining cheap universal approximation. We test and corroborate the theory experimentally with a six-legged walking machine. The experiments show that the sufficient controller complexity predicted by our theory is tight, which means that the theory has direct practical implications. Keywords: cheap design, embodiment, sensorimotor loop, universal approximation, conditional restricted Boltzmann machine