 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNMODE --- Neuro-MODule Evolution
Paper and Code
Jan 18, 2017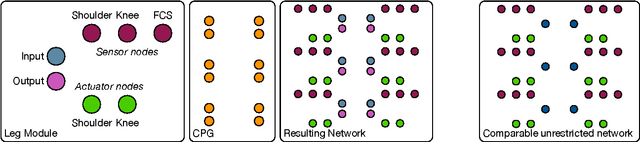

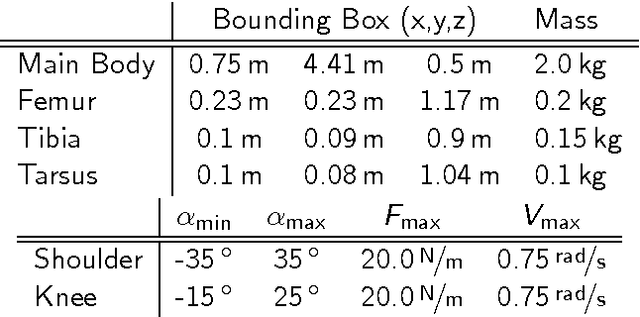
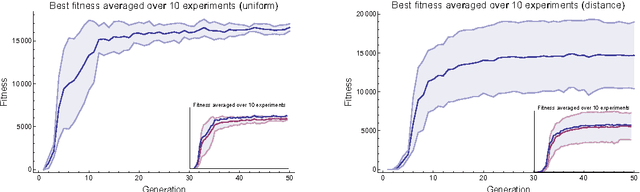
Modularisation, repetition, and symmetry are structural features shared by almost all biological neural networks. These features are very unlikely to be found by the means of structural evolution of artificial neural networks. This paper introduces NMODE, which is specifically designed to operate on neuro-modules. NMODE addresses a second problem in the context of evolutionary robotics, which is incremental evolution of complex behaviours for complex machines, by offering a way to interface neuro-modules. The scenario in mind is a complex walking machine, for which a locomotion module is evolved first, that is then extended by other modules in later stages. We show that NMODE is able to evolve a locomotion behaviour for a standard six-legged walking machine in approximately 10 generations and show how it can be used for incremental evolution of a complex walking machine. The entire source code used in this paper is publicly available through GitHub.