 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer vision in automated parking systems: Design, implementation and challenges
Apr 26, 2021
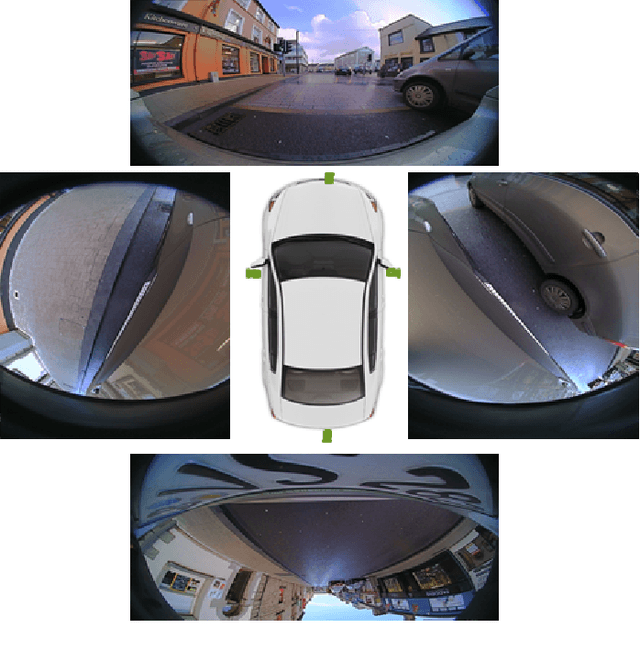
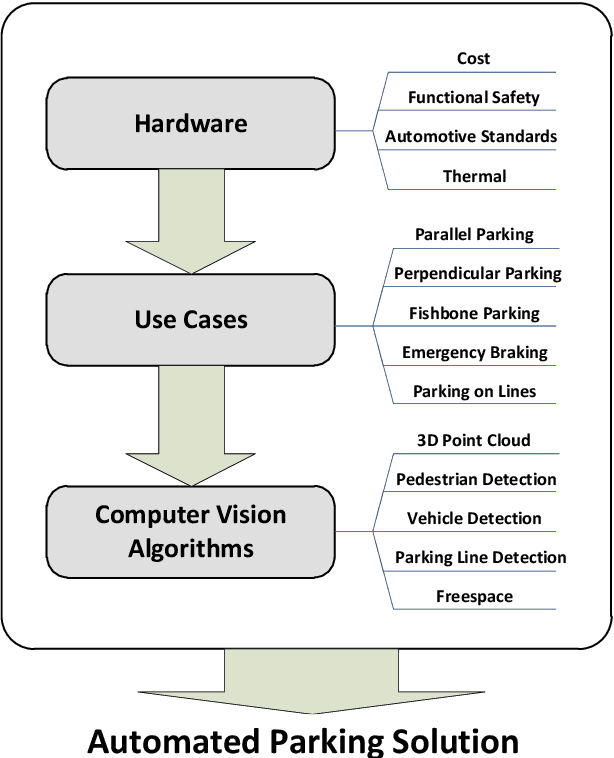
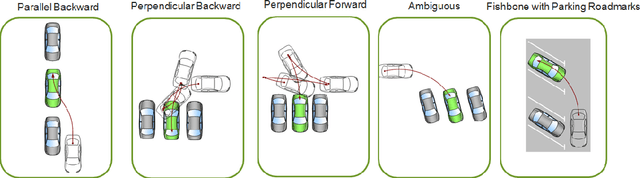
Automated driving is an active area of research in both industry and academia. Automated Parking, which is automated driving in a restricted scenario of parking with low speed manoeuvring, is a key enabling product for fully autonomous driving systems. It is also an important milestone from the perspective of a higher end system built from the previous generation driver assistance systems comprising of collision warning, pedestrian detection, etc. In this paper, we discuss the design and implementation of an automated parking system from the perspective of computer vision algorithms. Designing a low-cost system with functional safety is challenging and leads to a large gap between the prototype and the end product, in order to handle all the corner cases. We demonstrate how camera systems are crucial for addressing a range of automated parking use cases and also, to add robustness to systems based on active distance measuring sensors, such as ultrasonics and radar. The key vision modules which realize the parking use cases are 3D reconstruction, parking slot marking recognition, freespace and vehicle/pedestrian detection. We detail the important parking use cases and demonstrate how to combine the vision modules to form a robust parking system. To the best of the authors' knowledge, this is the first detailed discussion of a systemic view of a commercial automated parking system.
Spherical formulation of moving object geometric constraints for monocular fisheye cameras
Mar 06, 2020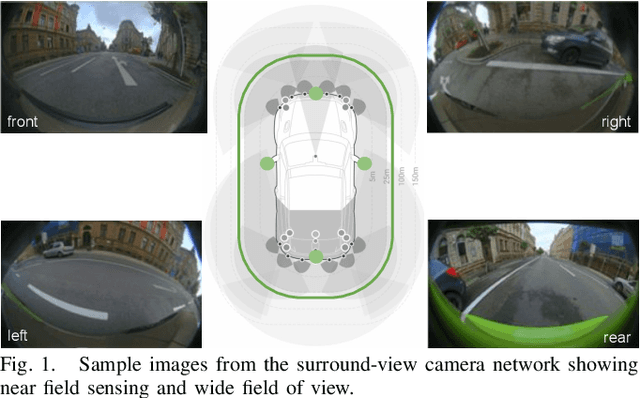
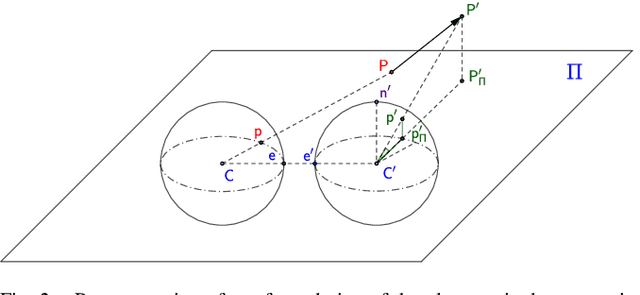
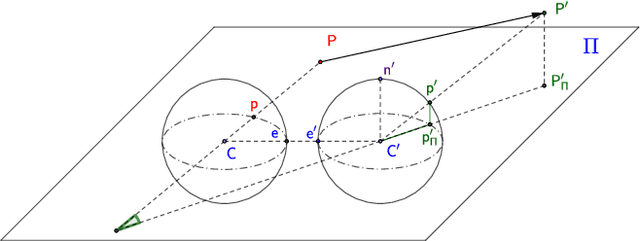
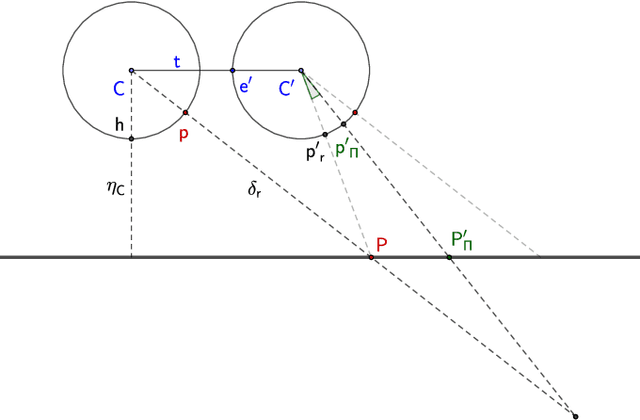
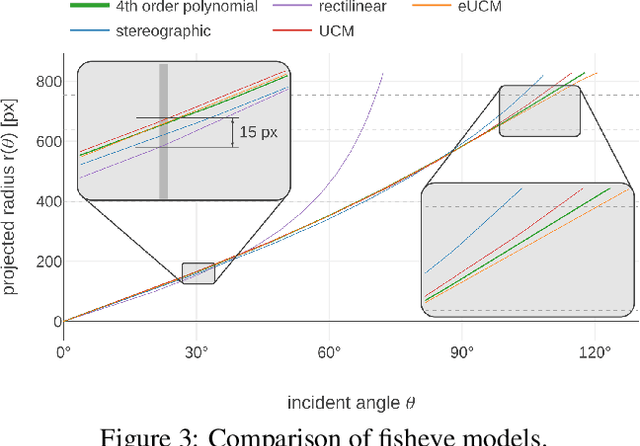
In this paper, we introduce a moving object detection algorithm for fisheye cameras used in autonomous driving. We reformulate the three commonly used constraints in rectilinear images (epipolar, positive depth and positive height constraints) to spherical coordinates which is invariant to specific camera configuration once the calibration is known. One of the main challenging use case in autonomous driving is to detect parallel moving objects which suffer from motion-parallax ambiguity. To alleviate this, we formulate an additional fourth constraint, called the anti-parallel constraint, which aids the detection of objects with motion that mirrors the ego-vehicle possible. We analyze the proposed algorithm in different scenarios and demonstrate that it works effectively operating directly on fisheye images.
* 8 pages, 9 figures, 2 tables Conference ITSC 2019
FisheyeMultiNet: Real-time Multi-task Learning Architecture for Surround-view Automated Parking System
Dec 23, 2019
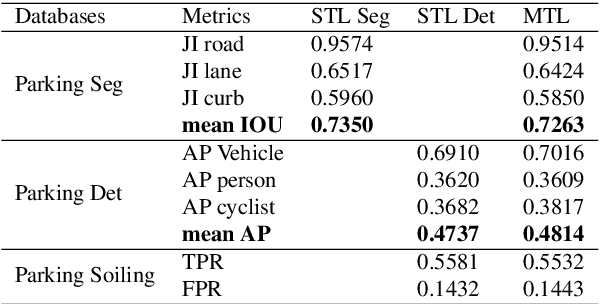
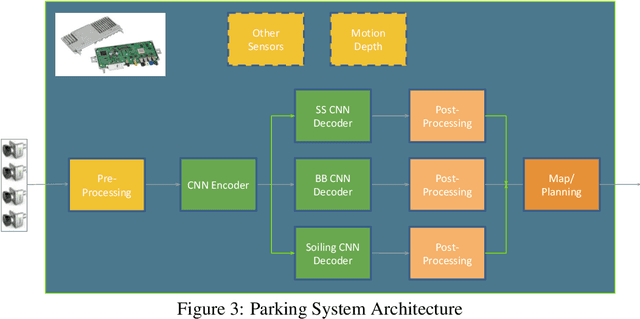
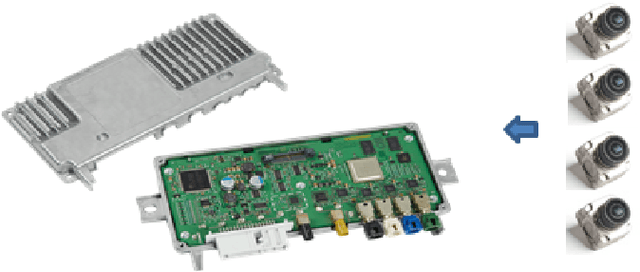
Automated Parking is a low speed manoeuvring scenario which is quite unstructured and complex, requiring full 360{\deg} near-field sensing around the vehicle. In this paper, we discuss the design and implementation of an automated parking system from the perspective of camera based deep learning algorithms. We provide a holistic overview of an industrial system covering the embedded system, use cases and the deep learning architecture. We demonstrate a real-time multi-task deep learning network called FisheyeMultiNet, which detects all the necessary objects for parking on a low-power embedded system. FisheyeMultiNet runs at 15 fps for 4 cameras and it has three tasks namely object detection, semantic segmentation and soiling detection. To encourage further research, we release a partial dataset of 5,000 images containing semantic segmentation and bounding box detection ground truth via WoodScape project \cite{yogamani2019woodscape}.
WoodScape: A multi-task, multi-camera fisheye dataset for autonomous driving
May 04, 2019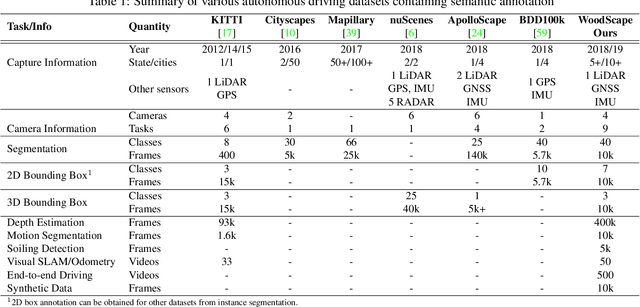
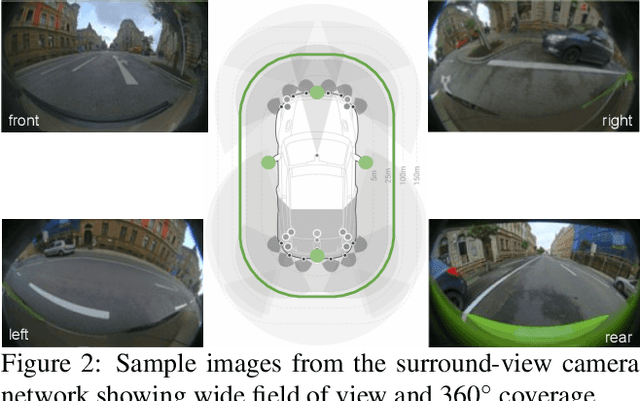
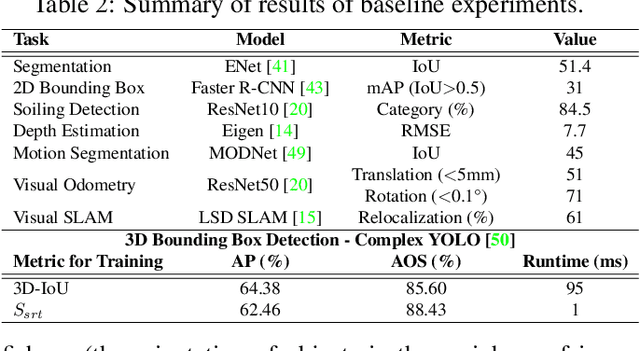
Fisheye cameras are commonly employed for obtaining a large field of view in surveillance, augmented reality and in particular automotive applications. In spite of its prevalence, there are few public datasets for detailed evaluation of computer vision algorithms on fisheye images. We release the first extensive fisheye automotive dataset, WoodScape, named after Robert Wood who invented the fisheye camera in 1906. WoodScape comprises of four surround view cameras and nine tasks including segmentation, depth estimation, 3D bounding box detection and soiling detection. Semantic annotation of 40 classes at the instance level is provided for over 10,000 images and annotation for other tasks are provided for over 100,000 images. We would like to encourage the community to adapt computer vision models for fisheye camera instead of naive rectification.