 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer vision in automated parking systems: Design, implementation and challenges
Paper and Code
Apr 26, 2021
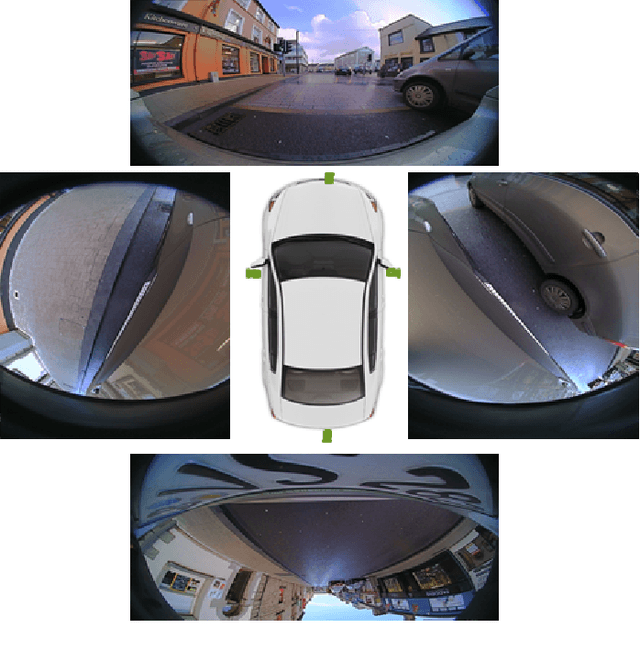
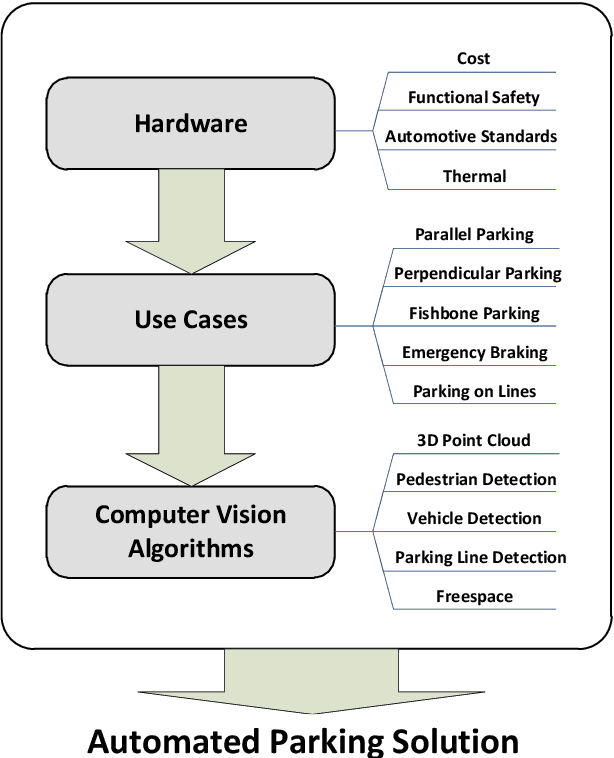
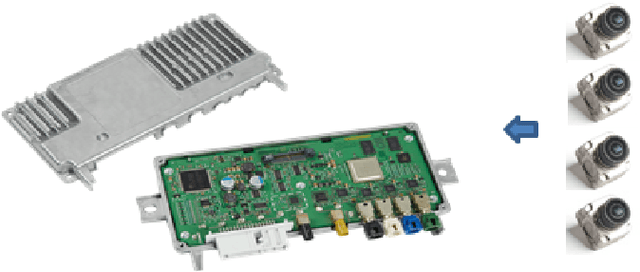
Automated driving is an active area of research in both industry and academia. Automated Parking, which is automated driving in a restricted scenario of parking with low speed manoeuvring, is a key enabling product for fully autonomous driving systems. It is also an important milestone from the perspective of a higher end system built from the previous generation driver assistance systems comprising of collision warning, pedestrian detection, etc. In this paper, we discuss the design and implementation of an automated parking system from the perspective of computer vision algorithms. Designing a low-cost system with functional safety is challenging and leads to a large gap between the prototype and the end product, in order to handle all the corner cases. We demonstrate how camera systems are crucial for addressing a range of automated parking use cases and also, to add robustness to systems based on active distance measuring sensors, such as ultrasonics and radar. The key vision modules which realize the parking use cases are 3D reconstruction, parking slot marking recognition, freespace and vehicle/pedestrian detection. We detail the important parking use cases and demonstrate how to combine the vision modules to form a robust parking system. To the best of the authors' knowledge, this is the first detailed discussion of a systemic view of a commercial automated parking system.