 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEVIO: Lightweight Embedded Visual Inertial Odometry for Resource-Constrained Devices
Feb 03, 2026Accurate, infrastructure-less sensor systems for motion tracking are essential for mobile robotics and augmented reality (AR) applications. The most popular state-of-the-art visual-inertial odometry (VIO) systems, however, are too computationally demanding for resource-constrained hardware, such as micro-drones and smart glasses. This work presents LEVIO, a fully featured VIO pipeline optimized for ultra-low-power compute platforms, allowing six-degrees-of-freedom (DoF) real-time sensing. LEVIO incorporates established VIO components such as Oriented FAST and Rotated BRIEF (ORB) feature tracking and bundle adjustment, while emphasizing a computationally efficient architecture with parallelization and low memory usage to suit embedded microcontrollers and low-power systems-on-chip (SoCs). The paper proposes and details the algorithmic design choices and the hardware-software co-optimization approach, and presents real-time performance on resource-constrained hardware. LEVIO is validated on a parallel-processing ultra-low-power RISC-V SoC, achieving 20 FPS while consuming less than 100 mW, and benchmarked against public VIO datasets, offering a compelling balance between efficiency and accuracy. To facilitate reproducibility and adoption, the complete implementation is released as open-source.
* This article has been accepted for publication in the IEEE Sensors Journal (JSEN)
Eco-WakeLoc: An Energy-Neutral and Cooperative UWB Real-Time Locating System
Jan 06, 2026Indoor localization systems face a fundamental trade-off between efficiency and responsiveness, which is especially important for emerging use cases such as mobile robots operating in GPS-denied environments. Traditional RTLS either require continuously powered infrastructure, limiting their scalability, or are limited by their responsiveness. This work presents Eco-WakeLoc, designed to achieve centimeter-level UWB localization while remaining energy-neutral by combining ultra-low power wake-up radios (WuRs) with solar energy harvesting. By activating anchor nodes only on demand, the proposed system eliminates constant energy consumption while achieving centimeter-level positioning accuracy. To reduce coordination overhead and improve scalability, Eco-WakeLoc employs cooperative localization where active tags initiate ranging exchanges (trilateration), while passive tags opportunistically reuse these messages for TDOA positioning. An additive-increase/multiplicative-decrease (AIMD)-based energy-aware scheduler adapts localization rates according to the harvested energy, thereby maximizing the overall performance of the sensor network while ensuring long-term energy neutrality. The measured energy consumption is only 3.22mJ per localization for active tags, 951uJ for passive tags, and 353uJ for anchors. Real-world deployment on a quadruped robot with nine anchors confirms the practical feasibility, achieving an average accuracy of 43cm in dynamic indoor environments. Year-long simulations show that tags achieve an average of 2031 localizations per day, retaining over 7% battery capacity after one year -- demonstrating that the RTLS achieves sustained energy-neutral operation. Eco-WakeLoc demonstrates that high-accuracy indoor localization can be achieved at scale without continuous infrastructure operation, combining energy neutrality, cooperative positioning, and adaptive scheduling.
ListenToJESD204B: A Lightweight Open-Source JESD204B IP Core for FPGA-Based Ultrasound Acquisition systems
Aug 20, 2025The demand for hundreds of tightly synchronized channels operating at tens of MSPS in ultrasound systems exceeds conventional low-voltage differential signaling links' bandwidth, pin count, and latency. Although the JESD204B serial interface mitigates these limitations, commercial FPGA IP cores are proprietary, costly, and resource-intensive. We present ListenToJESD204B, an open-source receiver IP core released under a permissive Solderpad 0.51 license for AMD Xilinx Zynq UltraScale+ devices. Written in synthesizable SystemVerilog, the core supports four GTH/GTY lanes at 12.8 Gb/s and provides cycle-accurate AXI-Stream data alongside deterministic Subclass~1 latency. It occupies only 107 configurable logic blocks (approximately 437 LUTs), representing a 79\% reduction compared to comparable commercially available IP. A modular data path featuring per-lane elastic buffers, SYSREF-locked LMFC generation, and optional LFSR descrambling facilitates scaling to high lane counts. We verified protocol compliance through simulation against the Xilinx JESD204C IP in JESD204B mode and on hardware using TI AFE58JD48 ADCs. Block stability was verified by streaming 80 MSPS, 16-bit samples over two 12.8 Gb/s links for 30 minutes with no errors.
RGB-Event Fusion with Self-Attention for Collision Prediction
May 07, 2025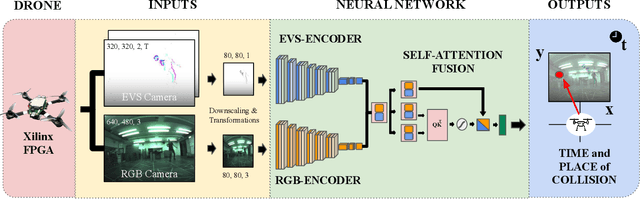
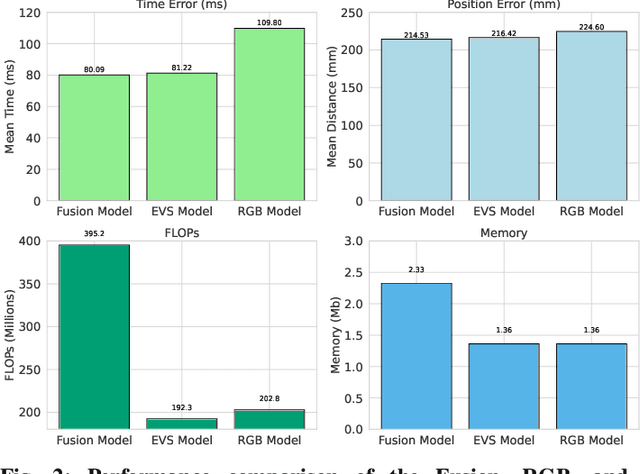
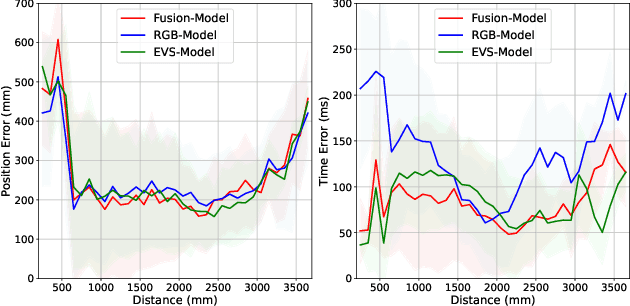
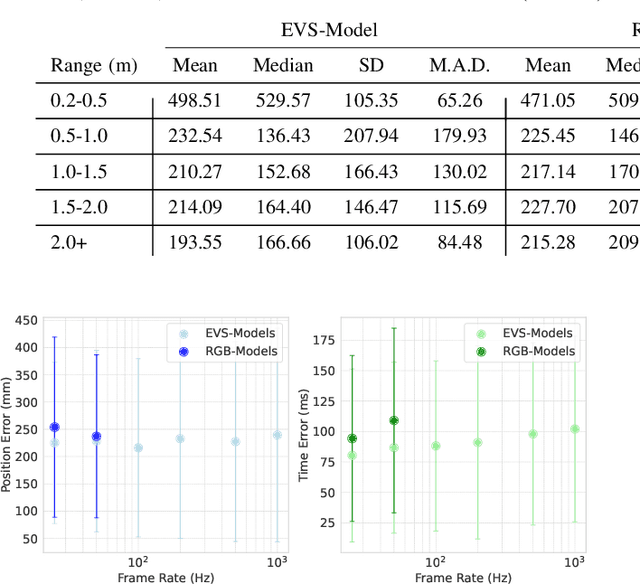
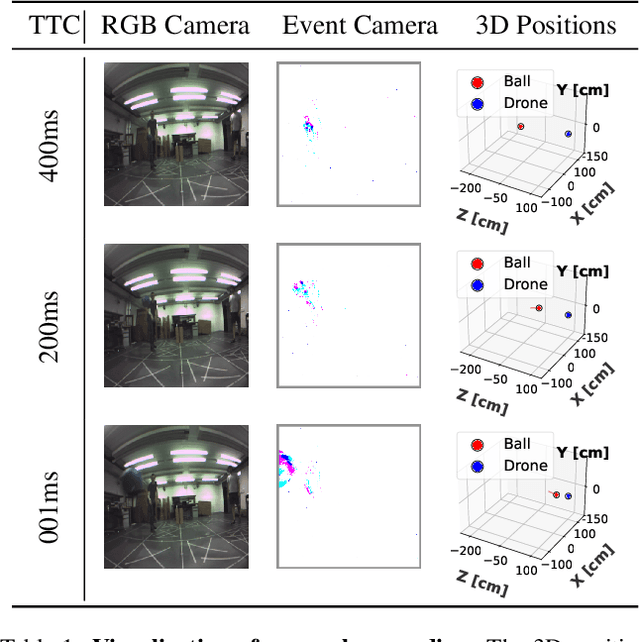
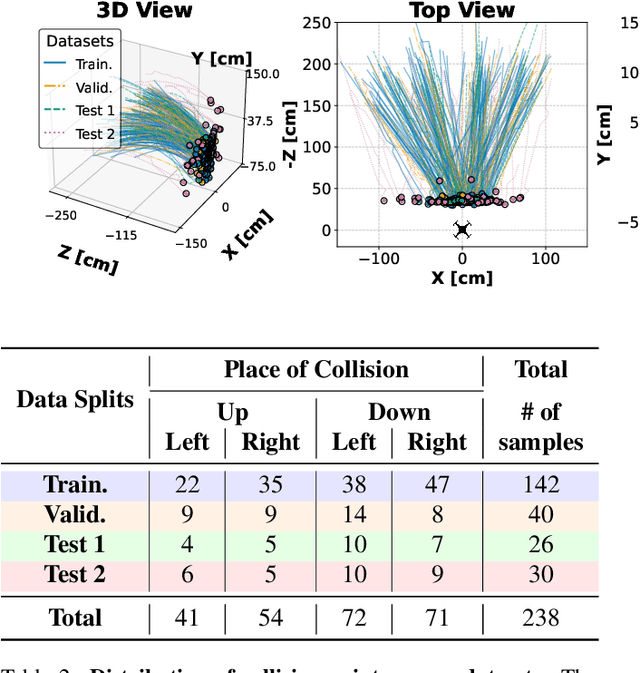
Ensuring robust and real-time obstacle avoidance is critical for the safe operation of autonomous robots in dynamic, real-world environments. This paper proposes a neural network framework for predicting the time and collision position of an unmanned aerial vehicle with a dynamic object, using RGB and event-based vision sensors. The proposed architecture consists of two separate encoder branches, one for each modality, followed by fusion by self-attention to improve prediction accuracy. To facilitate benchmarking, we leverage the ABCD [8] dataset collected that enables detailed comparisons of single-modality and fusion-based approaches. At the same prediction throughput of 50Hz, the experimental results show that the fusion-based model offers an improvement in prediction accuracy over single-modality approaches of 1% on average and 10% for distances beyond 0.5m, but comes at the cost of +71% in memory and + 105% in FLOPs. Notably, the event-based model outperforms the RGB model by 4% for position and 26% for time error at a similar computational cost, making it a competitive alternative. Additionally, we evaluate quantized versions of the event-based models, applying 1- to 8-bit quantization to assess the trade-offs between predictive performance and computational efficiency. These findings highlight the trade-offs of multi-modal perception using RGB and event-based cameras in robotic applications.
Towards Low-Latency Event-based Obstacle Avoidance on a FPGA-Drone
Apr 14, 2025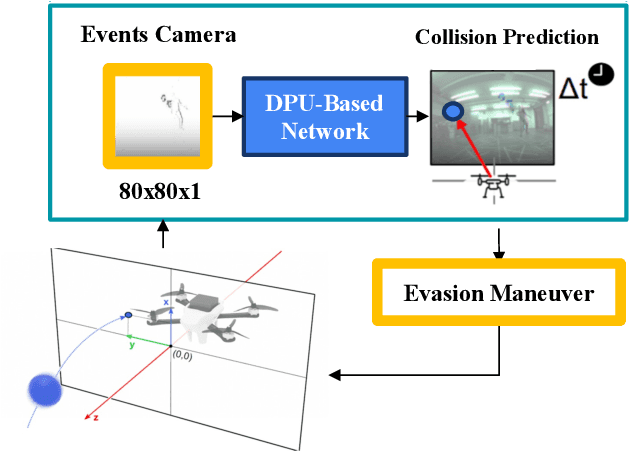
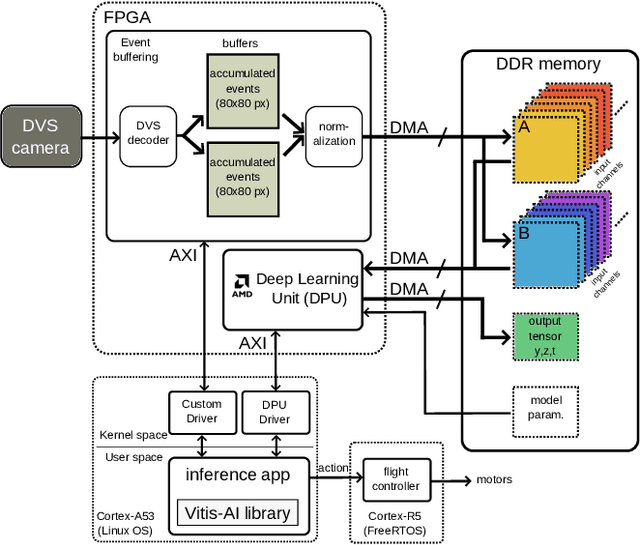
This work quantitatively evaluates the performance of event-based vision systems (EVS) against conventional RGB-based models for action prediction in collision avoidance on an FPGA accelerator. Our experiments demonstrate that the EVS model achieves a significantly higher effective frame rate (1 kHz) and lower temporal (-20 ms) and spatial prediction errors (-20 mm) compared to the RGB-based model, particularly when tested on out-of-distribution data. The EVS model also exhibits superior robustness in selecting optimal evasion maneuvers. In particular, in distinguishing between movement and stationary states, it achieves a 59 percentage point advantage in precision (78% vs. 19%) and a substantially higher F1 score (0.73 vs. 0.06), highlighting the susceptibility of the RGB model to overfitting. Further analysis in different combinations of spatial classes confirms the consistent performance of the EVS model in both test data sets. Finally, we evaluated the system end-to-end and achieved a latency of approximately 2.14 ms, with event aggregation (1 ms) and inference on the processing unit (0.94 ms) accounting for the largest components. These results underscore the advantages of event-based vision for real-time collision avoidance and demonstrate its potential for deployment in resource-constrained environments.
A Proximity-Based Approach for Dynamically Matching Industrial Assets and Their Operators Using Low-Power IoT Devices
Dec 18, 2024



Asset tracking solutions have proven their significance in industrial contexts, as evidenced by their successful commercialization (e.g., Hilti On!Track). However, a seamless solution for matching assets with their users, such as operators of construction power tools, is still missing. By enabling assetuser matching, organizations gain valuable insights that can be used to optimize user health and safety, asset utilization, and maintenance. This paper introduces a novel approach to address this gap by leveraging existing Bluetooth Low Energy (BLE)-enabled low-power Internet of Things (IoT) devices. The proposed framework comprises the following components: i) a wearable device, ii) an IoT device attached to or embedded in the assets, iii) an algorithm to estimate the distance between assets and operators by exploiting simple received signal strength indicator (RSSI) measurements via an Extended Kalman Filter (EKF), and iv) a cloud-based algorithm that collects all estimated distances to derive the correct asset-operator matching. The effectiveness of the proposed system has been validated through indoor and outdoor experiments in a construction setting for identifying the operator of a power tool. A physical prototype was developed to evaluate the algorithms in a realistic setup. The results demonstrated a median accuracy of 0.49m in estimating the distance between assets and users, and up to 98.6% in correctly matching users with their assets.
PuLsE: Accurate and Robust Ultrasound-based Continuous Heart-Rate Monitoring on a Wrist-Worn IoT Device
Oct 21, 2024



This work explores the feasibility of employing ultrasound (US) US technology in a wrist-worn IoT device for low-power, high-fidelity heart-rate (HR) extraction. US offers deep tissue penetration and can monitor pulsatile arterial blood flow in large vessels and the surrounding tissue, potentially improving robustness and accuracy compared to PPG. We present an IoT wearable system prototype utilizing a commercial microcontroller MCU employing the onboard ADC to capture high frequency US signals and an innovative low-power US pulser. An envelope filter lowers the bandwidth of the US signal by a factor of >5x, reducing the system's acquisition requirements without compromising accuracy (correlation coefficient between HR extracted from enveloped and raw signals, r(92)=0.99, p<0.001). The full signal processing pipeline is ported to fixed point arithmetic for increased energy efficiency and runs entirely onboard. The system has an average power consumption of 5.8mW, competitive with PPG based systems, and the HR extraction algorithm requires only 68kB of RAM and 71ms of processing time on an ARM Cortex-M4 MCU. The system is estimated to run continuously for more than 7 days on a smartwatch battery. To accurately evaluate the proposed circuit and algorithm and identify the anatomical location on the wrist with the highest accuracy for HR extraction, we collected a dataset from 10 healthy adults at three different wrist positions. The dataset comprises roughly 5 hours of HR data with an average of 80.6+-16.3 bpm. During recording, we synchronized the established ECG gold standard with our US-based method. The comparisons yields a Pearson correlation coefficient of r(92)=0.99, p<0.001 and a mean error of 0.69+-1.99 bpm in the lateral wrist position near the radial artery. The dataset and code have been open-sourced at https://github.com/mgiordy/Ultrasound-Heart-Rate
A Lora-Based and Maintenance-Free Cattle Monitoring System for Alpine Pastures and Remote Locations
Jun 10, 2024



The advent of the Internet of Things (IoT) is boosting the proliferation of sensors and smart devices in industry and daily life. Continuous monitoring IoT systems are also finding applications in agriculture, particularly in the realm of smart farming. The adoption of wearable sensors to record the activity of livestock has garnered increasing interest. Such a device enables farmers to locate, monitor, and constantly assess the health status of their cattle more efficiently and effectively, even in challenging terrain and remote locations. This work presents a maintenance-free and robust smart sensing system that is capable of tracking cattle in remote locations and collecting activity parameters, such as the individual's grazing- and resting time. To support the paradigm of smart farming, the cattle tracker is capable of monitoring the cow's activity by analyzing data from an accelerometer, magnetometer, temperature sensor, and Global Navigation Satellite System (GNSS) module, providing them over Long Range Wide Area Network (LoRaWAN) to a backend server. By consuming 511.9 J per day with all subsystems enabled and a data transmission every 15 minutes, the custom-designed sensor node achieves a battery lifetime of 4 months. When exploiting the integrated solar energy harvesting subsystem, this can be even increased by 40% to up to 6 months. The final sensing system's robust operation is proven in a trial run with two cows on a pasture for over three days. Evaluations of the experimental results clearly show behavior patterns, which confirms the practicability of the proposed solution.
ForzaETH Race Stack -- Scaled Autonomous Head-to-Head Racing on Fully Commercial off-the-Shelf Hardware
Mar 18, 2024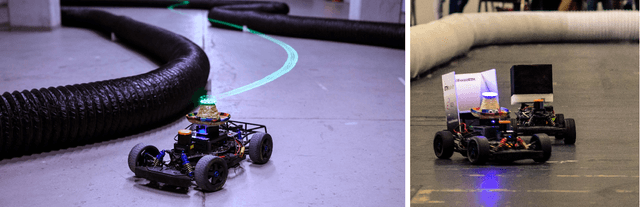
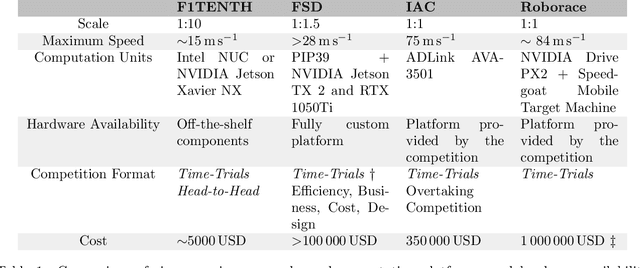
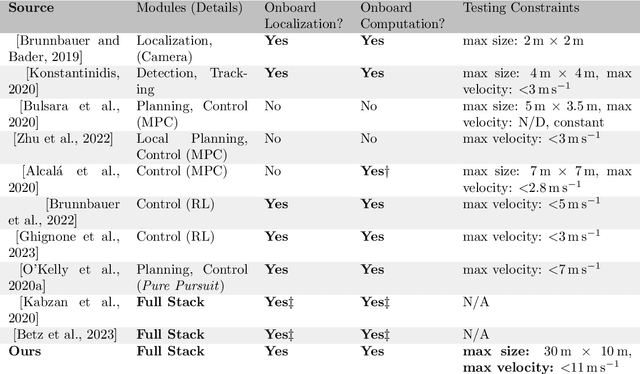
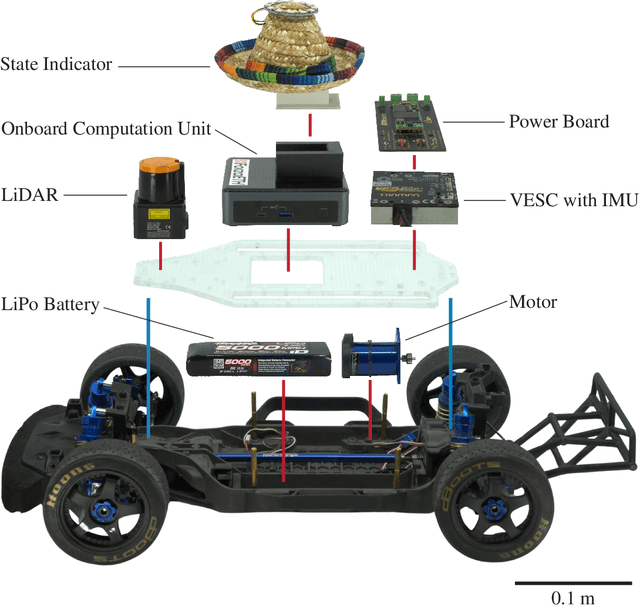
Autonomous racing in robotics combines high-speed dynamics with the necessity for reliability and real-time decision-making. While such racing pushes software and hardware to their limits, many existing full-system solutions necessitate complex, custom hardware and software, and usually focus on Time-Trials rather than full unrestricted Head-to-Head racing, due to financial and safety constraints. This limits their reproducibility, making advancements and replication feasible mostly for well-resourced laboratories with comprehensive expertise in mechanical, electrical, and robotics fields. Researchers interested in the autonomy domain but with only partial experience in one of these fields, need to spend significant time with familiarization and integration. The ForzaETH Race Stack addresses this gap by providing an autonomous racing software platform designed for F1TENTH, a 1:10 scaled Head-to-Head autonomous racing competition, which simplifies replication by using commercial off-the-shelf hardware. This approach enhances the competitive aspect of autonomous racing and provides an accessible platform for research and development in the field. The ForzaETH Race Stack is designed with modularity and operational ease of use in mind, allowing customization and adaptability to various environmental conditions, such as track friction and layout. Capable of handling both Time-Trials and Head-to-Head racing, the stack has demonstrated its effectiveness, robustness, and adaptability in the field by winning the official F1TENTH international competition multiple times.
Angle of Arrival and Centimeter Distance Estimation on a Smart UWB Sensor Node
Dec 21, 2023



Accurate and low-power indoor localization is becoming more and more of a necessity to empower novel consumer and industrial applications. In this field, the most promising technology is based on UWB modulation; however, current UWB positioning systems do not reach centimeter accuracy in general deployments due to multipath and nonisotropic antennas, still necessitating several fixed anchors to estimate an object's position in space. This article presents an in-depth study and assessment of angle of arrival (AoA) UWB measurements using a compact, low-power solution integrating a novel commercial module with phase difference of arrival (PDoA) estimation as integrated feature. Results demonstrate the possibility of reaching centimeter distance precision and ang 2.4 average angular accuracy in many operative conditions, e.g., in a ang 90 range around the center. Moreover, integrating the channel impulse response, the phase differential of arrival, and the point-to-point distance, an error correction model is discussed to compensate for reflections, multipaths, and front-back ambiguity.