 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Proximity-Based Approach for Dynamically Matching Industrial Assets and Their Operators Using Low-Power IoT Devices
Dec 18, 2024



Asset tracking solutions have proven their significance in industrial contexts, as evidenced by their successful commercialization (e.g., Hilti On!Track). However, a seamless solution for matching assets with their users, such as operators of construction power tools, is still missing. By enabling assetuser matching, organizations gain valuable insights that can be used to optimize user health and safety, asset utilization, and maintenance. This paper introduces a novel approach to address this gap by leveraging existing Bluetooth Low Energy (BLE)-enabled low-power Internet of Things (IoT) devices. The proposed framework comprises the following components: i) a wearable device, ii) an IoT device attached to or embedded in the assets, iii) an algorithm to estimate the distance between assets and operators by exploiting simple received signal strength indicator (RSSI) measurements via an Extended Kalman Filter (EKF), and iv) a cloud-based algorithm that collects all estimated distances to derive the correct asset-operator matching. The effectiveness of the proposed system has been validated through indoor and outdoor experiments in a construction setting for identifying the operator of a power tool. A physical prototype was developed to evaluate the algorithms in a realistic setup. The results demonstrated a median accuracy of 0.49m in estimating the distance between assets and users, and up to 98.6% in correctly matching users with their assets.
Energy-aware Trajectory Optimization for UAV-mounted RIS and Full-duplex Relay
Jan 22, 2024In the evolving landscape of sixth-generation (6G) wireless networks, unmanned aerial vehicles (UAVs) have emerged as transformative tools for dynamic and adaptive connectivity. However, dynamically adjusting their position to offer favorable communication channels introduces operational challenges in terms of energy consumption, especially when integrating advanced communication technologies like reconfigurable intelligent surfaces (RISs) and full-duplex relays (FDRs). To this end, by recognizing the pivotal role of UAV mobility, the paper introduces an energy-aware trajectory design for UAV-mounted RISs and UAV-mounted FDRs using the decode and forward (DF) protocol, aiming to maximize the network minimum rate and enhance user fairness, while taking into consideration the available on-board energy. Specifically, this work highlights their distinct energy consumption characteristics and their associated integration challenges by developing appropriate energy consumption models for both UAV-mounted RISs and FDRs that capture the intricate relationship between key factors such as weight, and their operational characteristics. Furthermore, a joint time-division multiple access (TDMA) user scheduling-UAV trajectory optimization problem is formulated, considering the power dynamics of both systems, while assuring that the UAV energy is not depleted mid-air. Finally, simulation results underscore the importance of energy considerations in determining the optimal trajectory and scheduling and provide insights into the performance comparison of UAV-mounted RISs and FDRs in UAV-assisted wireless networks.
Energy-Aware Adaptive Sampling for Self-Sustainability in Resource-Constrained IoT Devices
Oct 31, 2023



In the ever-growing Internet of Things (IoT) landscape, smart power management algorithms combined with energy harvesting solutions are crucial to obtain self-sustainability. This paper presents an energy-aware adaptive sampling rate algorithm designed for embedded deployment in resource-constrained, battery-powered IoT devices. The algorithm, based on a finite state machine (FSM) and inspired by Transmission Control Protocol (TCP) Reno's additive increase and multiplicative decrease, maximizes sensor sampling rates, ensuring power self-sustainability without risking battery depletion. Moreover, we characterized our solar cell with data acquired over 48 days and used the model created to obtain energy data from an open-source world-wide dataset. To validate our approach, we introduce the EcoTrack device, a versatile device with global navigation satellite system (GNSS) capabilities and Long-Term Evolution Machine Type Communication (LTE-M) connectivity, supporting MQTT protocol for cloud data relay. This multi-purpose device can be used, for instance, as a health and safety wearable, remote hazard monitoring system, or as a global asset tracker. The results, validated on data from three different European cities, show that the proposed algorithm enables self-sustainability while maximizing sampled locations per day. In experiments conducted with a 3000 mAh battery capacity, the algorithm consistently maintained a minimum of 24 localizations per day and achieved peaks of up to 3000.
Zero-Energy Reconfigurable Intelligent Surfaces (zeRIS)
May 12, 2023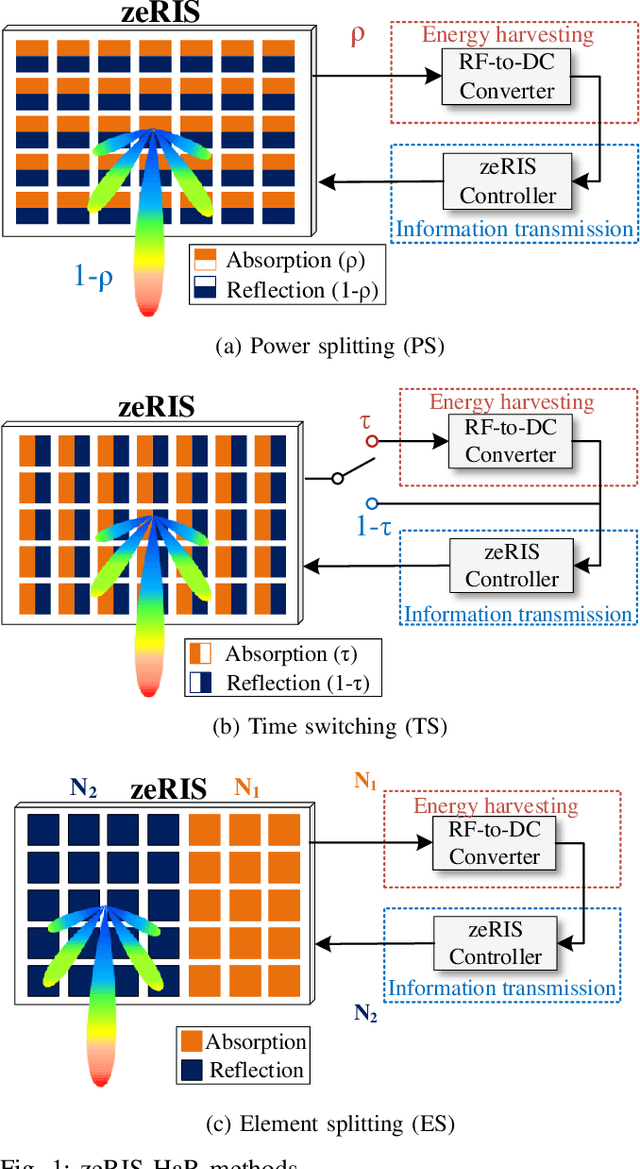
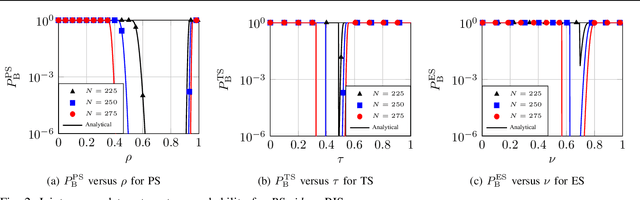
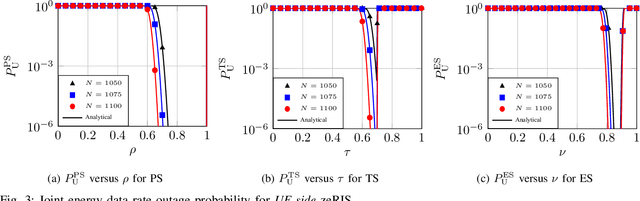
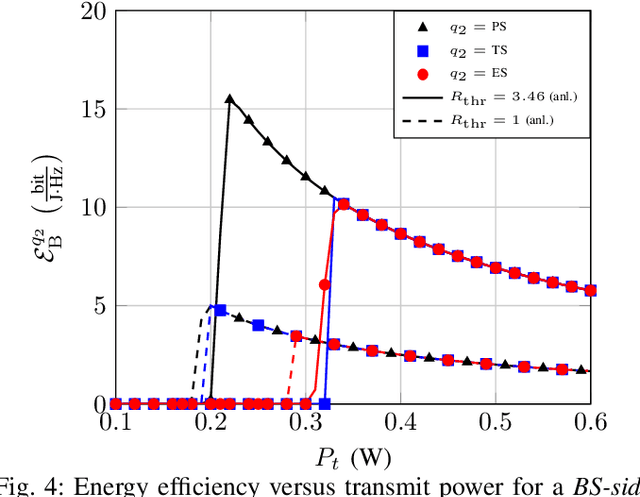
A primary objective of the forthcoming sixth generation (6G) of wireless networking is to support demanding applications, while ensuring energy efficiency. Programmable wireless environments (PWEs) have emerged as a promising solution, leveraging reconfigurable intelligent surfaces (RISs), to control wireless propagation and deliver exceptional quality-ofservice. In this paper, we analyze the performance of a network supported by zero-energy RISs (zeRISs), which harvest energy for their operation and contribute to the realization of PWEs. Specifically, we investigate joint energy-data rate outage probability and the energy efficiency of a zeRIS-assisted communication system by employing three harvest-and-reflect (HaR) methods, i) power splitting, ii) time switching, and iii) element splitting. Furthermore, we consider two zeRIS deployment strategies, namely BS-side zeRIS and UE-side zeRIS. Simulation results validate the provided analysis and examine which HaR method performs better depending on the zeRIS placement. Finally, valuable insights and conclusions for the performance of zeRISassisted wireless networks are drawn from the presented results.