 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn2Core: Leveraging Influence Functions for Coreset Selection in Instruction Finetuning of Large Language Models
Aug 07, 2024Despite advancements, fine-tuning Large Language Models (LLMs) remains costly due to the extensive parameter count and substantial data requirements for model generalization. Accessibility to computing resources remains a barrier for the open-source community. To address this challenge, we propose the In2Core algorithm, which selects a coreset by analyzing the correlation between training and evaluation samples with a trained model. Notably, we assess the model's internal gradients to estimate this relationship, aiming to rank the contribution of each training point. To enhance efficiency, we propose an optimization to compute influence functions with a reduced number of layers while achieving similar accuracy. By applying our algorithm to instruction fine-tuning data of LLMs, we can achieve similar performance with just 50% of the training data. Meantime, using influence functions to analyze model coverage to certain testing samples could provide a reliable and interpretable signal on the training set's coverage of those test points.
A Sim2Real Approach for Identifying Task-Relevant Properties in Interpretable Machine Learning
May 31, 2024
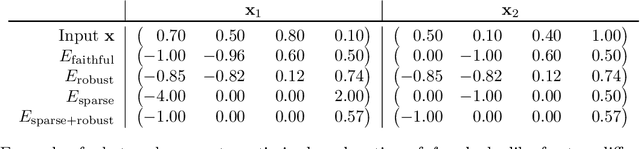

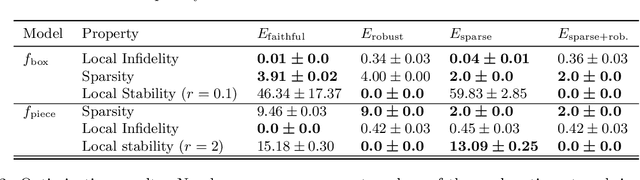
Existing user studies suggest that different tasks may require explanations with different properties. However, user studies are expensive. In this paper, we introduce a generalizable, cost-effective method for identifying task-relevant explanation properties in silico, which can guide the design of more expensive user studies. We use our approach to identify relevant proxies for three example tasks and validate our simulation with real user studies.
Event-Driven Visual-Tactile Sensing and Learning for Robots
Sep 15, 2020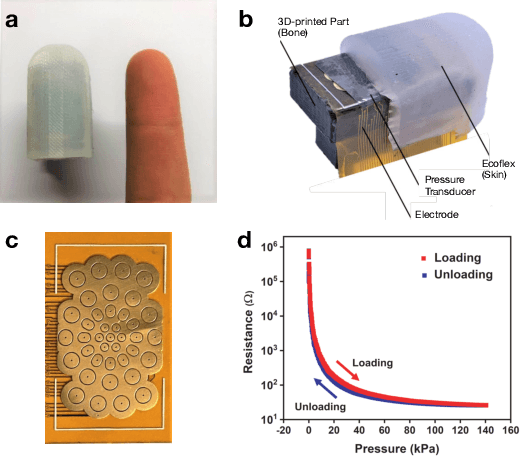
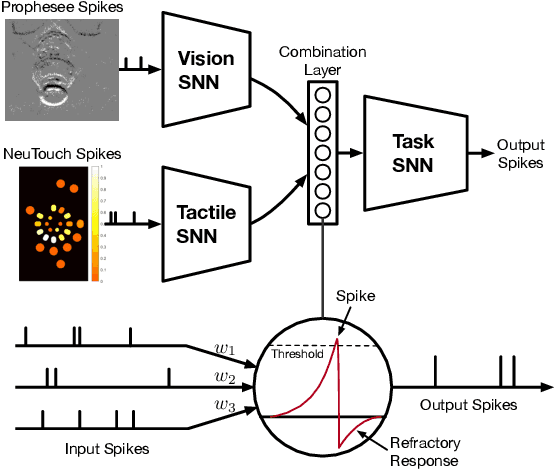
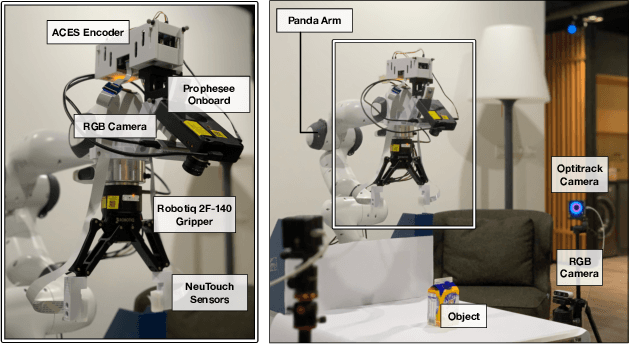
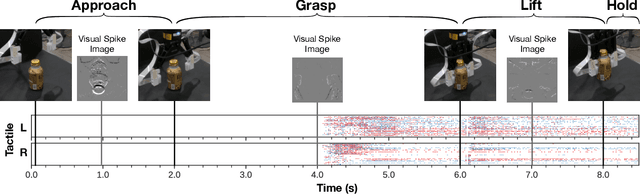
This work contributes an event-driven visual-tactile perception system, comprising a novel biologically-inspired tactile sensor and multi-modal spike-based learning. Our neuromorphic fingertip tactile sensor, NeuTouch, scales well with the number of taxels thanks to its event-based nature. Likewise, our Visual-Tactile Spiking Neural Network (VT-SNN) enables fast perception when coupled with event sensors. We evaluate our visual-tactile system (using the NeuTouch and Prophesee event camera) on two robot tasks: container classification and rotational slip detection. On both tasks, we observe good accuracies relative to standard deep learning methods. We have made our visual-tactile datasets freely-available to encourage research on multi-modal event-driven robot perception, which we believe is a promising approach towards intelligent power-efficient robot systems.
ST-MNIST -- The Spiking Tactile MNIST Neuromorphic Dataset
May 08, 2020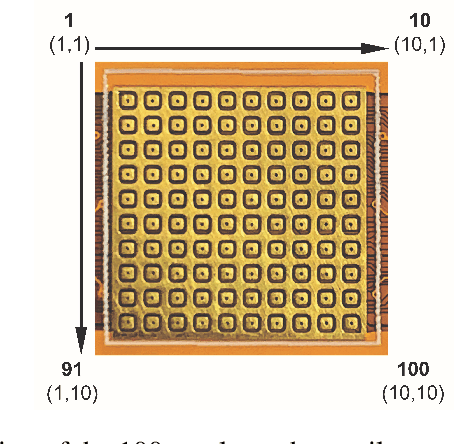
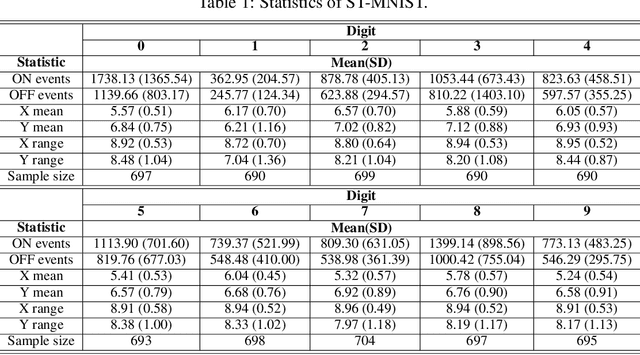
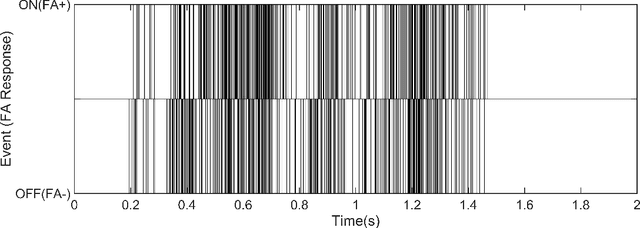
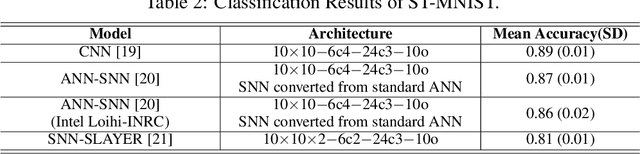
Tactile sensing is an essential modality for smart robots as it enables them to interact flexibly with physical objects in their environment. Recent advancements in electronic skins have led to the development of data-driven machine learning methods that exploit this important sensory modality. However, current datasets used to train such algorithms are limited to standard synchronous tactile sensors. There is a dearth of neuromorphic event-based tactile datasets, principally due to the scarcity of large-scale event-based tactile sensors. Having such datasets is crucial for the development and evaluation of new algorithms that process spatio-temporal event-based data. For example, evaluating spiking neural networks on conventional frame-based datasets is considered sub-optimal. Here, we debut a novel neuromorphic Spiking Tactile MNIST (ST-MNIST) dataset, which comprises handwritten digits obtained by human participants writing on a neuromorphic tactile sensor array. We also describe an initial effort to evaluate our ST-MNIST dataset using existing artificial and spiking neural network models. The classification accuracies provided herein can serve as performance benchmarks for future work. We anticipate that our ST-MNIST dataset will be of interest and useful to the neuromorphic and robotics research communities.