 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEventDrop: data augmentation for event-based learning
Jun 07, 2021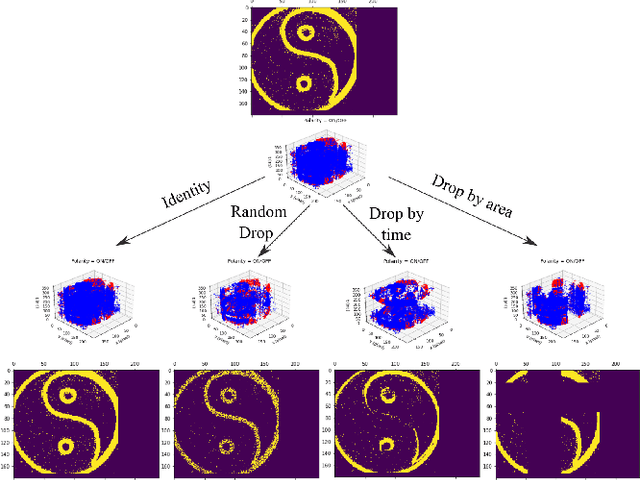


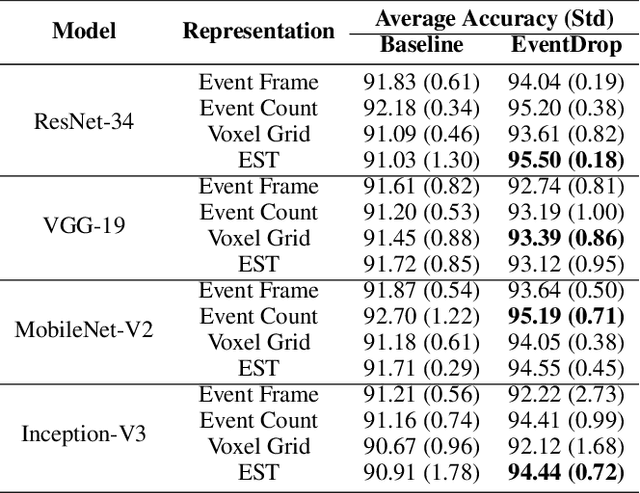
The advantages of event-sensing over conventional sensors (e.g., higher dynamic range, lower time latency, and lower power consumption) have spurred research into machine learning for event data. Unsurprisingly, deep learning has emerged as a competitive methodology for learning with event sensors; in typical setups, discrete and asynchronous events are first converted into frame-like tensors on which standard deep networks can be applied. However, over-fitting remains a challenge, particularly since event datasets remain small relative to conventional datasets (e.g., ImageNet). In this paper, we introduce EventDrop, a new method for augmenting asynchronous event data to improve the generalization of deep models. By dropping events selected with various strategies, we are able to increase the diversity of training data (e.g., to simulate various levels of occlusion). From a practical perspective, EventDrop is simple to implement and computationally low-cost. Experiments on two event datasets (N-Caltech101 and N-Cars) demonstrate that EventDrop can significantly improve the generalization performance across a variety of deep networks.
Event-Driven Visual-Tactile Sensing and Learning for Robots
Sep 15, 2020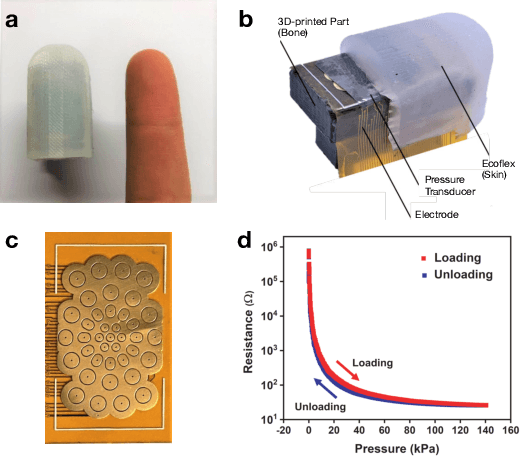
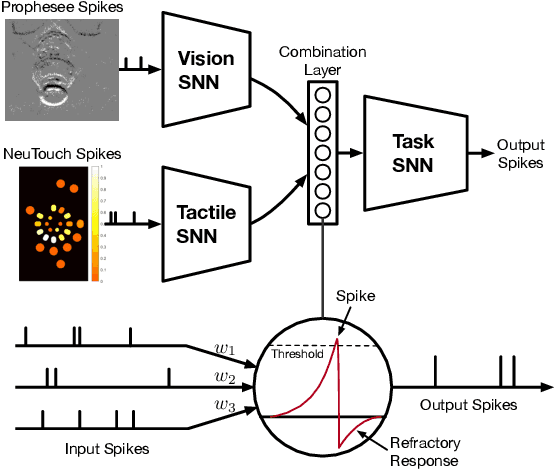
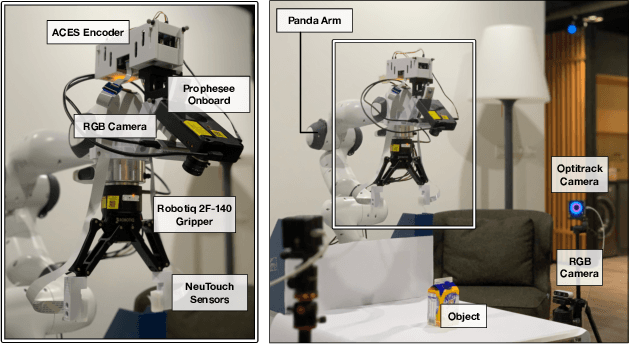
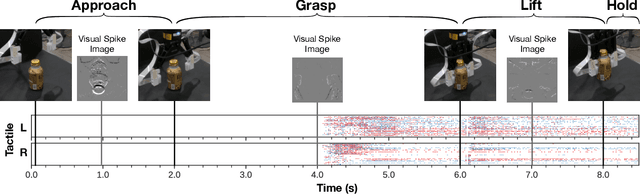
This work contributes an event-driven visual-tactile perception system, comprising a novel biologically-inspired tactile sensor and multi-modal spike-based learning. Our neuromorphic fingertip tactile sensor, NeuTouch, scales well with the number of taxels thanks to its event-based nature. Likewise, our Visual-Tactile Spiking Neural Network (VT-SNN) enables fast perception when coupled with event sensors. We evaluate our visual-tactile system (using the NeuTouch and Prophesee event camera) on two robot tasks: container classification and rotational slip detection. On both tasks, we observe good accuracies relative to standard deep learning methods. We have made our visual-tactile datasets freely-available to encourage research on multi-modal event-driven robot perception, which we believe is a promising approach towards intelligent power-efficient robot systems.
TactileSGNet: A Spiking Graph Neural Network for Event-based Tactile Object Recognition
Aug 01, 2020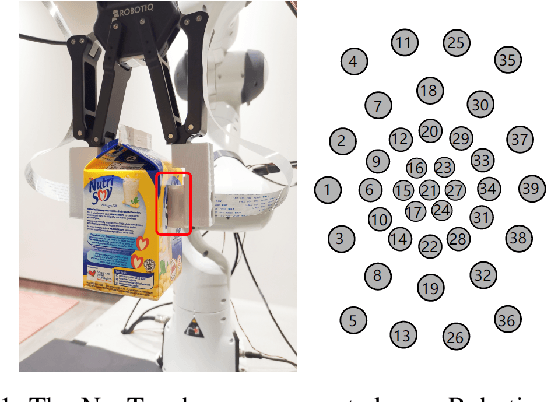

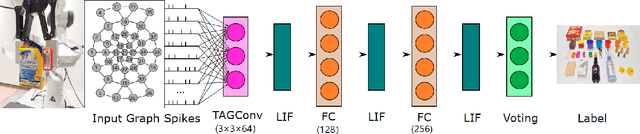
Tactile perception is crucial for a variety of robot tasks including grasping and in-hand manipulation. New advances in flexible, event-driven, electronic skins may soon endow robots with touch perception capabilities similar to humans. These electronic skins respond asynchronously to changes (e.g., in pressure, temperature), and can be laid out irregularly on the robot's body or end-effector. However, these unique features may render current deep learning approaches such as convolutional feature extractors unsuitable for tactile learning. In this paper, we propose a novel spiking graph neural network for event-based tactile object recognition. To make use of local connectivity of taxels, we present several methods for organizing the tactile data in a graph structure. Based on the constructed graphs, we develop a spiking graph convolutional network. The event-driven nature of spiking neural network makes it arguably more suitable for processing the event-based data. Experimental results on two tactile datasets show that the proposed method outperforms other state-of-the-art spiking methods, achieving high accuracies of approximately 90\% when classifying a variety of different household objects.