 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeST-MNIST -- The Spiking Tactile MNIST Neuromorphic Dataset
Paper and Code
May 08, 2020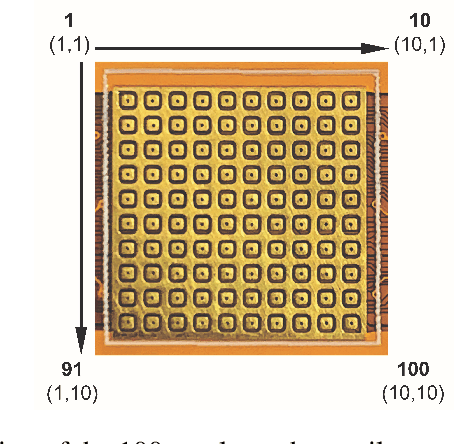
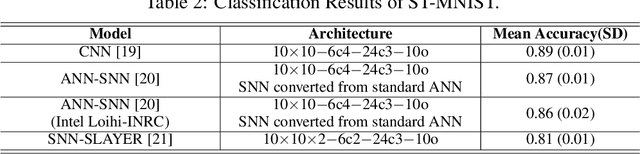
Tactile sensing is an essential modality for smart robots as it enables them to interact flexibly with physical objects in their environment. Recent advancements in electronic skins have led to the development of data-driven machine learning methods that exploit this important sensory modality. However, current datasets used to train such algorithms are limited to standard synchronous tactile sensors. There is a dearth of neuromorphic event-based tactile datasets, principally due to the scarcity of large-scale event-based tactile sensors. Having such datasets is crucial for the development and evaluation of new algorithms that process spatio-temporal event-based data. For example, evaluating spiking neural networks on conventional frame-based datasets is considered sub-optimal. Here, we debut a novel neuromorphic Spiking Tactile MNIST (ST-MNIST) dataset, which comprises handwritten digits obtained by human participants writing on a neuromorphic tactile sensor array. We also describe an initial effort to evaluate our ST-MNIST dataset using existing artificial and spiking neural network models. The classification accuracies provided herein can serve as performance benchmarks for future work. We anticipate that our ST-MNIST dataset will be of interest and useful to the neuromorphic and robotics research communities.