 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage-Guided Autonomous Guidewire Navigation in Robot-Assisted Endovascular Interventions using Reinforcement Learning
Mar 09, 2024



Autonomous robots in endovascular interventions possess the potential to navigate guidewires with safety and reliability, while reducing human error and shortening surgical time. However, current methods of guidewire navigation based on Reinforcement Learning (RL) depend on manual demonstration data or magnetic guidance. In this work, we propose an Image-guided Autonomous Guidewire Navigation (IAGN) method. Specifically, we introduce BDA-star, a path planning algorithm with boundary distance constraints, for the trajectory planning of guidewire navigation. We established an IAGN-RL environment where the observations are real-time guidewire feeding images highlighting the position of the guidewire tip and the planned path. We proposed a reward function based on the distances from both the guidewire tip to the planned path and the target to evaluate the agent's actions. Furthermore, in policy network, we employ a pre-trained convolutional neural network to extract features, mitigating stability issues and slow convergence rates associated with direct learning from raw pixels. Experiments conducted on the aortic simulation IAGN platform demonstrated that the proposed method, targeting the left subclavian artery and the brachiocephalic artery, achieved a 100% guidewire navigation success rate, along with reduced movement and retraction distances and trajectories tend to the center of the vessels.
UDCR: Unsupervised Aortic DSA/CTA Rigid Registration Using Deep Reinforcement Learning and Overlap Degree Calculation
Mar 09, 2024



The rigid registration of aortic Digital Subtraction Angiography (DSA) and Computed Tomography Angiography (CTA) can provide 3D anatomical details of the vasculature for the interventional surgical treatment of conditions such as aortic dissection and aortic aneurysms, holding significant value for clinical research. However, the current methods for 2D/3D image registration are dependent on manual annotations or synthetic data, as well as the extraction of landmarks, which is not suitable for cross-modal registration of aortic DSA/CTA. In this paper, we propose an unsupervised method, UDCR, for aortic DSA/CTA rigid registration based on deep reinforcement learning. Leveraging the imaging principles and characteristics of DSA and CTA, we have constructed a cross-dimensional registration environment based on spatial transformations. Specifically, we propose an overlap degree calculation reward function that measures the intensity difference between the foreground and background, aimed at assessing the accuracy of registration between segmentation maps and DSA images. This method is highly flexible, allowing for the loading of pre-trained models to perform registration directly or to seek the optimal spatial transformation parameters through online learning. We manually annotated 61 pairs of aortic DSA/CTA for algorithm evaluation. The results indicate that the proposed UDCR achieved a Mean Absolute Error (MAE) of 2.85 mm in translation and 4.35{\deg} in rotation, showing significant potential for clinical applications.
The Implicit Length Bias of Label Smoothing on Beam Search Decoding
May 02, 2022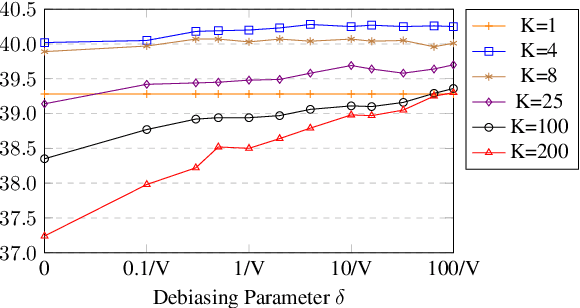
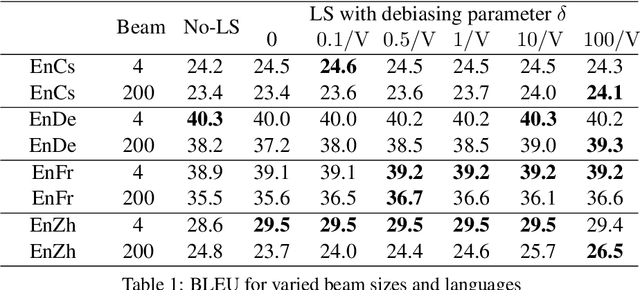
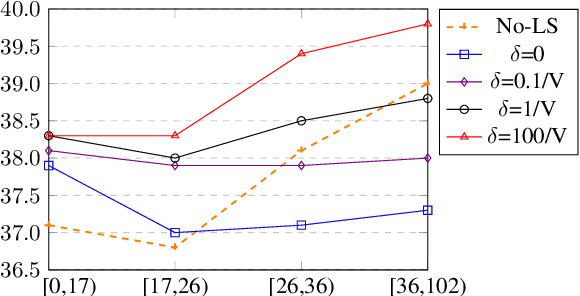
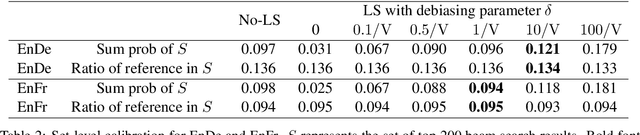
Label smoothing is ubiquitously applied in Neural Machine Translation (NMT) training. While label smoothing offers a desired regularization effect during model training, in this paper we demonstrate that it nevertheless introduces length biases in the beam search decoding procedure. Our analysis shows that label smoothing implicitly applies a length penalty term to output sequence, causing a bias towards shorter translations. We also show that for a model fully optimized with label smoothing, translation length is implicitly upper bounded by a fixed constant independent of input. We verify our theory by applying a simple rectification function at inference time to restore the unbiased distributions from the label-smoothed model predictions. This rectification method led to consistent quality improvements on WMT English-German, English-French, English-Czech and English-Chinese tasks, up to +0.3 BLEU at beam size 4 and +2.8 BLEU at beam size 200.
Minimum Bayes Risk Decoding with Neural Metrics of Translation Quality
Dec 02, 2021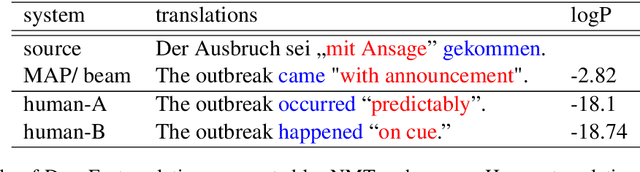
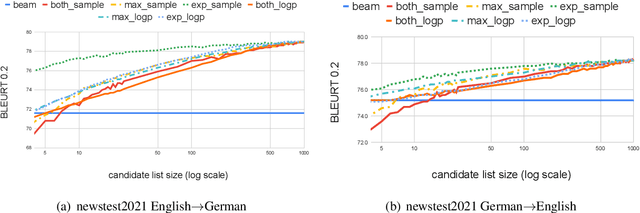
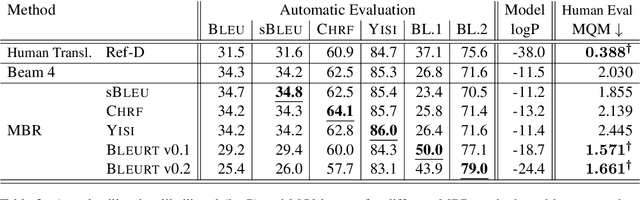
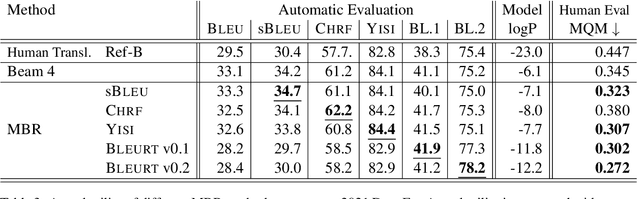
This work applies Minimum Bayes Risk (MBR) decoding to optimize diverse automated metrics of translation quality. Automatic metrics in machine translation have made tremendous progress recently. In particular, neural metrics, fine-tuned on human ratings (e.g. BLEURT, or COMET) are outperforming surface metrics in terms of correlations to human judgements. Our experiments show that the combination of a neural translation model with a neural reference-based metric, BLEURT, results in significant improvement in automatic and human evaluations. This improvement is obtained with translations different from classical beam-search output: these translations have much lower likelihood and are less favored by surface metrics like BLEU.
Lingvo: a Modular and Scalable Framework for Sequence-to-Sequence Modeling
Feb 21, 2019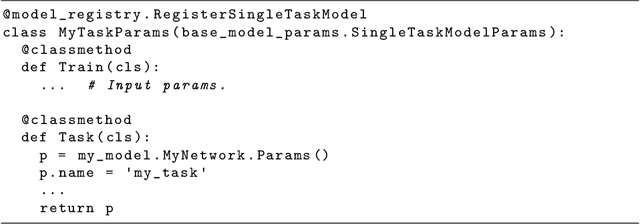
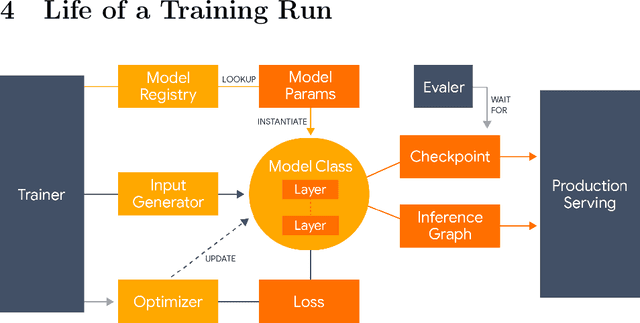
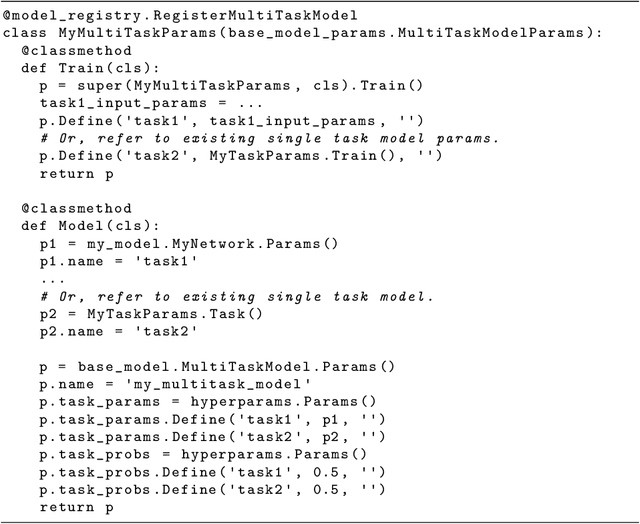
Lingvo is a Tensorflow framework offering a complete solution for collaborative deep learning research, with a particular focus towards sequence-to-sequence models. Lingvo models are composed of modular building blocks that are flexible and easily extensible, and experiment configurations are centralized and highly customizable. Distributed training and quantized inference are supported directly within the framework, and it contains existing implementations of a large number of utilities, helper functions, and the newest research ideas. Lingvo has been used in collaboration by dozens of researchers in more than 20 papers over the last two years. This document outlines the underlying design of Lingvo and serves as an introduction to the various pieces of the framework, while also offering examples of advanced features that showcase the capabilities of the framework.