 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFineRecon: Depth-aware Feed-forward Network for Detailed 3D Reconstruction
Apr 04, 2023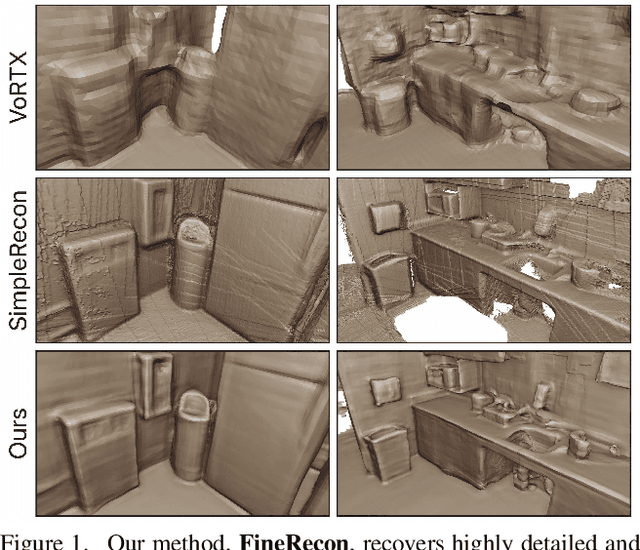



Recent works on 3D reconstruction from posed images have demonstrated that direct inference of scene-level 3D geometry without iterative optimization is feasible using a deep neural network, showing remarkable promise and high efficiency. However, the reconstructed geometries, typically represented as a 3D truncated signed distance function (TSDF), are often coarse without fine geometric details. To address this problem, we propose three effective solutions for improving the fidelity of inference-based 3D reconstructions. We first present a resolution-agnostic TSDF supervision strategy to provide the network with a more accurate learning signal during training, avoiding the pitfalls of TSDF interpolation seen in previous work. We then introduce a depth guidance strategy using multi-view depth estimates to enhance the scene representation and recover more accurate surfaces. Finally, we develop a novel architecture for the final layers of the network, conditioning the output TSDF prediction on high-resolution image features in addition to coarse voxel features, enabling sharper reconstruction of fine details. Our method produces smooth and highly accurate reconstructions, showing significant improvements across multiple depth and 3D reconstruction metrics.
LivePose: Online 3D Reconstruction from Monocular Video with Dynamic Camera Poses
Mar 31, 2023



Dense 3D reconstruction from RGB images traditionally assumes static camera pose estimates. This assumption has endured, even as recent works have increasingly focused on real-time methods for mobile devices. However, the assumption of one pose per image does not hold for online execution: poses from real-time SLAM are dynamic and may be updated following events such as bundle adjustment and loop closure. This has been addressed in the RGB-D setting, by de-integrating past views and re-integrating them with updated poses, but it remains largely untreated in the RGB-only setting. We formalize this problem to define the new task of online reconstruction from dynamically-posed images. To support further research, we introduce a dataset called LivePose containing the dynamic poses from a SLAM system running on ScanNet. We select three recent reconstruction systems and apply a framework based on de-integration to adapt each one to the dynamic-pose setting. In addition, we propose a novel, non-linear de-integration module that learns to remove stale scene content. We show that responding to pose updates is critical for high-quality reconstruction, and that our de-integration framework is an effective solution.
Optimizing Through Learned Errors for Accurate Sports Field Registration
Sep 17, 2019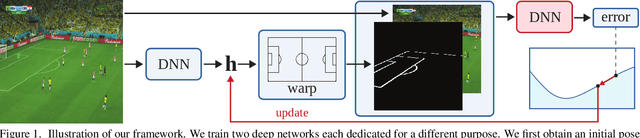
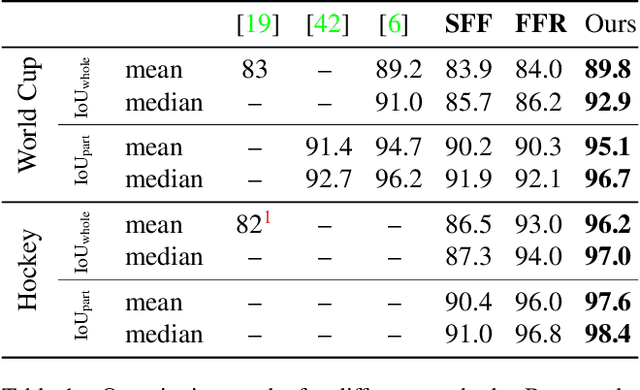
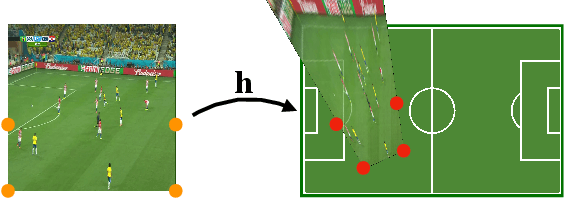
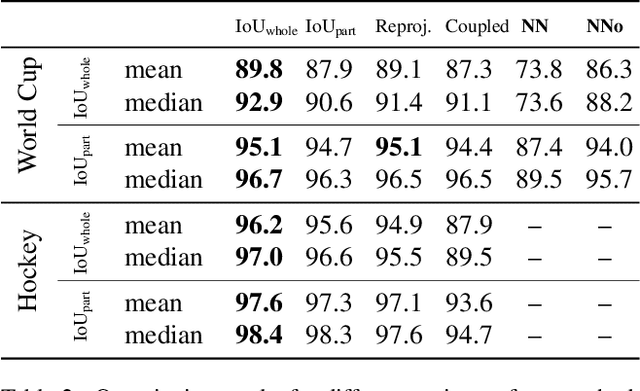
We propose an optimization-based framework to register sports field templates onto broadcast videos. For accurate registration we go beyond the prevalent feed-forward paradigm. Instead, we propose to train a deep network that regresses the registration error, and then register images by finding the registration parameters that minimize the regressed error. We demonstrate the effectiveness of our method by applying it to real-world sports broadcast videos, outperforming the state of the art. We further apply our method on a synthetic toy example and demonstrate that our method brings significant gains even when the problem is simplified and unlimited training data is available.
MIST: Multiple Instance Spatial Transformer Network
Nov 26, 2018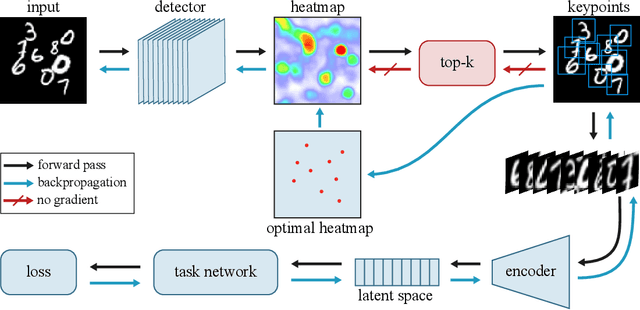
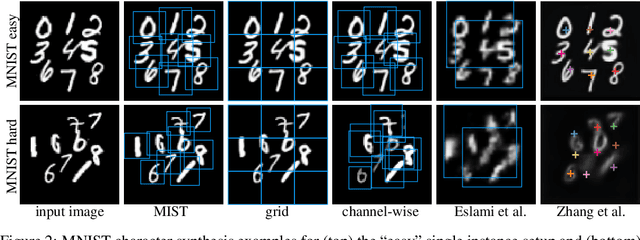
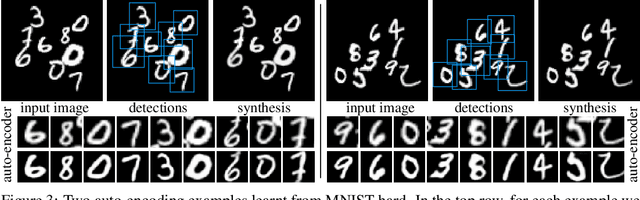
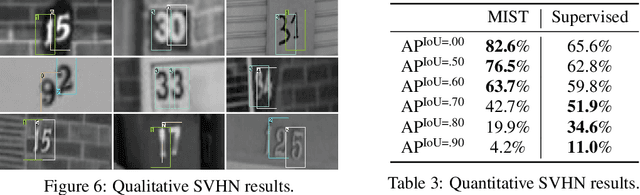
We propose a deep network that can be trained to tackle image reconstruction and classification problems that involve detection of multiple object instances, without any supervision regarding their whereabouts. The network learns to extract the most significant top-K patches, and feeds these patches to a task-specific network -- e.g., auto-encoder or classifier -- to solve a domain specific problem. The challenge in training such a network is the non-differentiable top-K selection process. To address this issue, we lift the training optimization problem by treating the result of top-K selection as a slack variable, resulting in a simple, yet effective, multi-stage training. Our method is able to learn to detect recurrent structures in the training dataset by learning to reconstruct images. It can also learn to localize structures when only knowledge on the occurrence of the object is provided, and in doing so it outperforms the state-of-the-art.