 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Plan, Planning to Learn: Adaptive Hierarchical RL-MPC for Sample-Efficient Decision Making
Dec 18, 2025We propose a new approach for solving planning problems with a hierarchical structure, fusing reinforcement learning and MPC planning. Our formulation tightly and elegantly couples the two planning paradigms. It leverages reinforcement learning actions to inform the MPPI sampler, and adaptively aggregates MPPI samples to inform the value estimation. The resulting adaptive process leverages further MPPI exploration where value estimates are uncertain, and improves training robustness and the overall resulting policies. This results in a robust planning approach that can handle complex planning problems and easily adapts to different applications, as demonstrated over several domains, including race driving, modified Acrobot, and Lunar Lander with added obstacles. Our results in these domains show better data efficiency and overall performance in terms of both rewards and task success, with up to a 72% increase in success rate compared to existing approaches, as well as accelerated convergence (x2.1) compared to non-adaptive sampling.
SimCoachCorpus: A naturalistic dataset with language and trajectories for embodied teaching
Sep 18, 2025Curated datasets are essential for training and evaluating AI approaches, but are often lacking in domains where language and physical action are deeply intertwined. In particular, few datasets capture how people acquire embodied skills through verbal instruction over time. To address this gap, we introduce SimCoachCorpus: a unique dataset of race car simulator driving that allows for the investigation of rich interactive phenomena during guided and unguided motor skill acquisition. In this dataset, 29 humans were asked to drive in a simulator around a race track for approximately ninety minutes. Fifteen participants were given personalized one-on-one instruction from a professional performance driving coach, and 14 participants drove without coaching. \name\ includes embodied features such as vehicle state and inputs, map (track boundaries and raceline), and cone landmarks. These are synchronized with concurrent verbal coaching from a professional coach and additional feedback at the end of each lap. We further provide annotations of coaching categories for each concurrent feedback utterance, ratings on students' compliance with coaching advice, and self-reported cognitive load and emotional state of participants (gathered from surveys during the study). The dataset includes over 20,000 concurrent feedback utterances, over 400 terminal feedback utterances, and over 40 hours of vehicle driving data. Our naturalistic dataset can be used for investigating motor learning dynamics, exploring linguistic phenomena, and training computational models of teaching. We demonstrate applications of this dataset for in-context learning, imitation learning, and topic modeling. The dataset introduced in this work will be released publicly upon publication of the peer-reviewed version of this paper. Researchers interested in early access may register at https://tinyurl.com/SimCoachCorpusForm.
Towards an Autonomous Test Driver: High-Performance Driver Modeling via Reinforcement Learning
Dec 05, 2024



Success in racing requires a unique combination of vehicle setup, understanding of the racetrack, and human expertise. Since building and testing many different vehicle configurations in the real world is prohibitively expensive, high-fidelity simulation is a critical part of racecar development. However, testing different vehicle configurations still requires expert human input in order to evaluate their performance on different racetracks. In this work, we present the first steps towards an autonomous test driver, trained using deep reinforcement learning, capable of evaluating changes in vehicle setup on racing performance while driving at the level of the best human drivers. In addition, the autonomous driver model can be tuned to exhibit more human-like behavioral patterns by incorporating imitation learning into the RL training process. This extension permits the possibility of driver-specific vehicle setup optimization.
Computational Teaching for Driving via Multi-Task Imitation Learning
Oct 02, 2024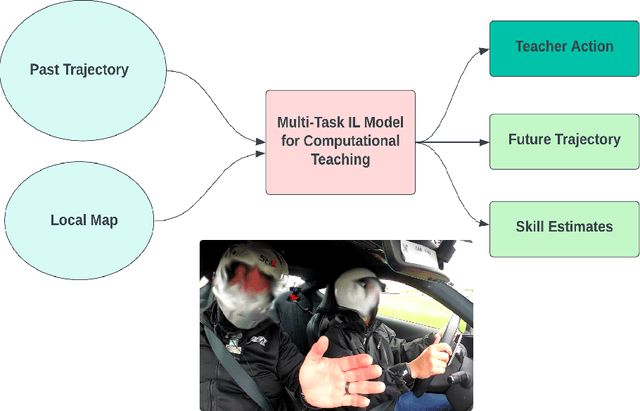
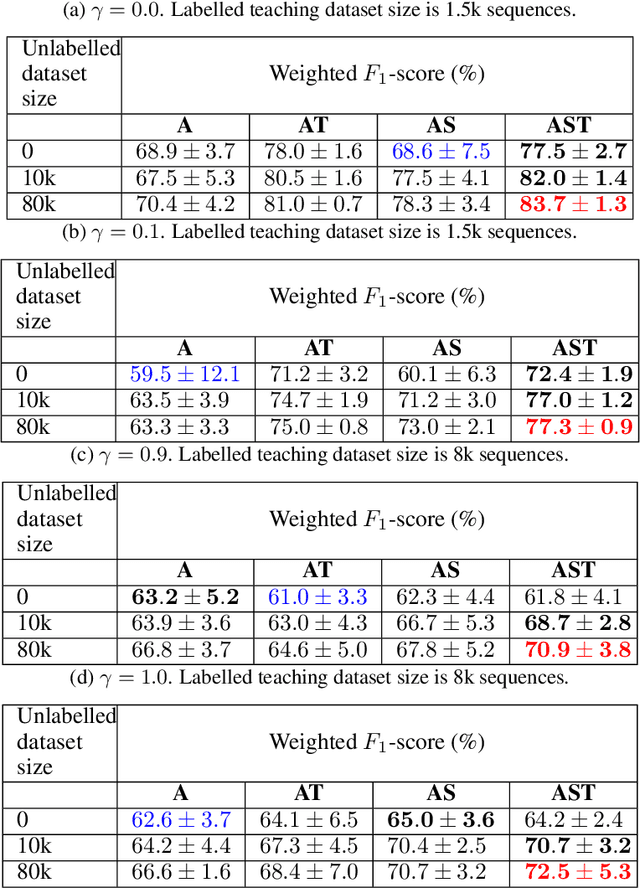
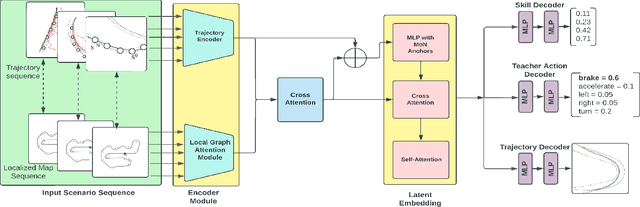
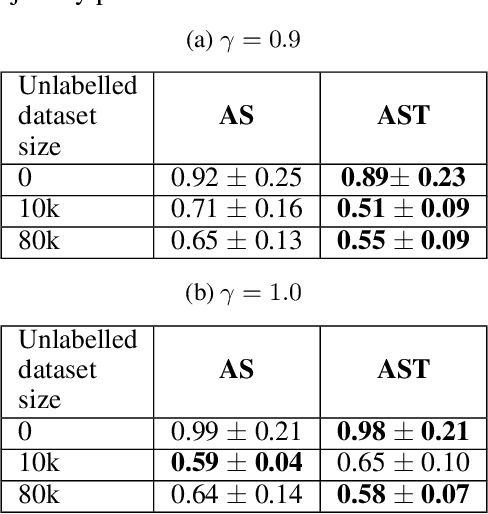
Learning motor skills for sports or performance driving is often done with professional instruction from expert human teachers, whose availability is limited. Our goal is to enable automated teaching via a learned model that interacts with the student similar to a human teacher. However, training such automated teaching systems is limited by the availability of high-quality annotated datasets of expert teacher and student interactions that are difficult to collect at scale. To address this data scarcity problem, we propose an approach for training a coaching system for complex motor tasks such as high performance driving via a Multi-Task Imitation Learning (MTIL) paradigm. MTIL allows our model to learn robust representations by utilizing self-supervised training signals from more readily available non-interactive datasets of humans performing the task of interest. We validate our approach with (1) a semi-synthetic dataset created from real human driving trajectories, (2) a professional track driving instruction dataset, (3) a track-racing driving simulator human-subject study, and (4) a system demonstration on an instrumented car at a race track. Our experiments show that the right set of auxiliary machine learning tasks improves performance in predicting teaching instructions. Moreover, in the human subjects study, students exposed to the instructions from our teaching system improve their ability to stay within track limits, and show favorable perception of the model's interaction with them, in terms of usefulness and satisfaction.
Autonomous Drifting with 3 Minutes of Data via Learned Tire Models
Jun 10, 2023Near the limits of adhesion, the forces generated by a tire are nonlinear and intricately coupled. Efficient and accurate modelling in this region could improve safety, especially in emergency situations where high forces are required. To this end, we propose a novel family of tire force models based on neural ordinary differential equations and a neural-ExpTanh parameterization. These models are designed to satisfy physically insightful assumptions while also having sufficient fidelity to capture higher-order effects directly from vehicle state measurements. They are used as drop-in replacements for an analytical brush tire model in an existing nonlinear model predictive control framework. Experiments with a customized Toyota Supra show that scarce amounts of driving data -- less than three minutes -- is sufficient to achieve high-performance autonomous drifting on various trajectories with speeds up to 45mph. Comparisons with the benchmark model show a $4 \times$ improvement in tracking performance, smoother control inputs, and faster and more consistent computation time.
GAME-UP: Game-Aware Mode Enumeration and Understanding for Trajectory Prediction
May 28, 2023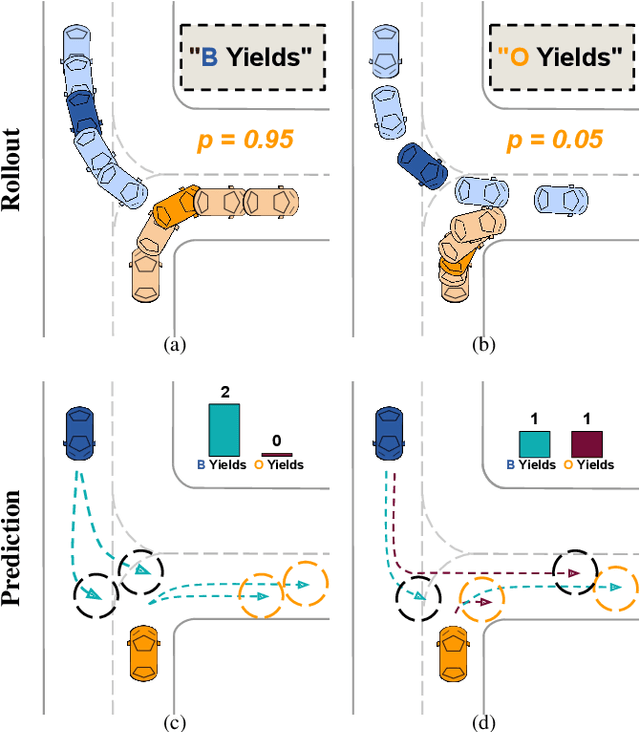

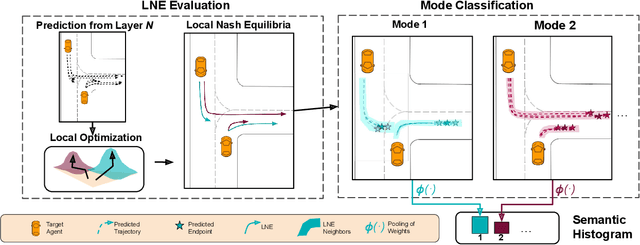
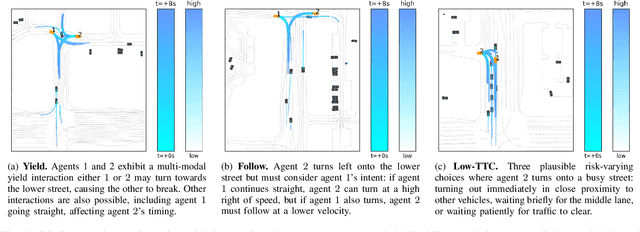
Interactions between road agents present a significant challenge in trajectory prediction, especially in cases involving multiple agents. Because existing diversity-aware predictors do not account for the interactive nature of multi-agent predictions, they may miss these important interaction outcomes. In this paper, we propose GAME-UP, a framework for trajectory prediction that leverages game-theoretic inverse reinforcement learning to improve coverage of multi-modal predictions. We use a training-time game-theoretic numerical analysis as an auxiliary loss resulting in improved coverage and accuracy without presuming a taxonomy of actions for the agents. We demonstrate our approach on the interactive subset of Waymo Open Motion Dataset, including three subsets involving scenarios with high interaction complexity. Experiment results show that our predictor produces accurate predictions while covering twice as many possible interactions versus a baseline model.