 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplanation through Reward Model Reconciliation using POMDP Tree Search
May 01, 2023

As artificial intelligence (AI) algorithms are increasingly used in mission-critical applications, promoting user-trust of these systems will be essential to their success. Ensuring users understand the models over which algorithms reason promotes user trust. This work seeks to reconcile differences between the reward model that an algorithm uses for online partially observable Markov decision (POMDP) planning and the implicit reward model assumed by a human user. Action discrepancies, differences in decisions made by an algorithm and user, are leveraged to estimate a user's objectives as expressed in weightings of a reward function.
A Generative Adversarial Network for Climate Tipping Point Discovery (TIP-GAN)
Feb 16, 2023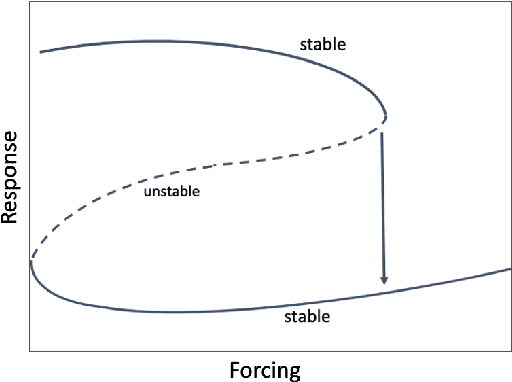
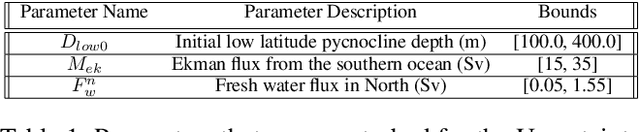
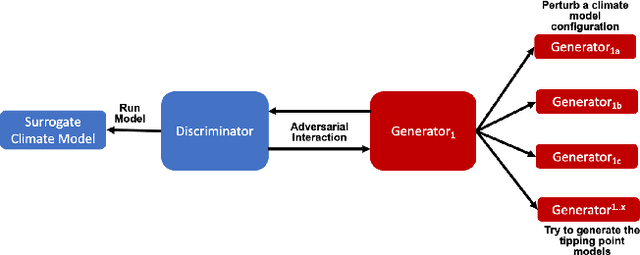
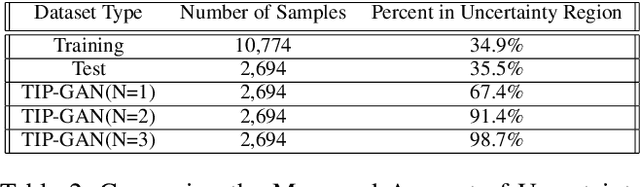
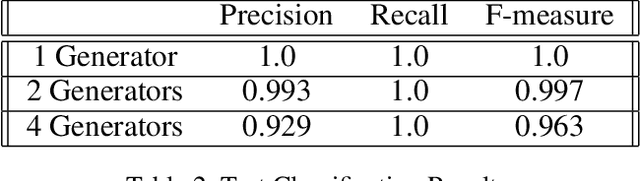
We propose a new Tipping Point Generative Adversarial Network (TIP-GAN) for better characterizing potential climate tipping points in Earth system models. We describe an adversarial game to explore the parameter space of these models, detect upcoming tipping points, and discover the drivers of tipping points. In this setup, a set of generators learn to construct model configurations that will invoke a climate tipping point. The discriminator learns to identify which generators are generating each model configuration and whether a given configuration will lead to a tipping point. The discriminator is trained using an oracle (a surrogate climate model) to test if a generated model configuration leads to a tipping point or not. We demonstrate the application of this GAN to invoke the collapse of the Atlantic Meridional Overturning Circulation (AMOC). We share experimental results of modifying the loss functions and the number of generators to exploit the area of uncertainty in model state space near a climate tipping point. In addition, we show that our trained discriminator can predict AMOC collapse with a high degree of accuracy without the use of the oracle. This approach could generalize to other tipping points, and could augment climate modeling research by directing users interested in studying tipping points to parameter sets likely to induce said tipping points in their computationally intensive climate models.
Using Artificial Intelligence to aid Scientific Discovery of Climate Tipping Points
Feb 14, 2023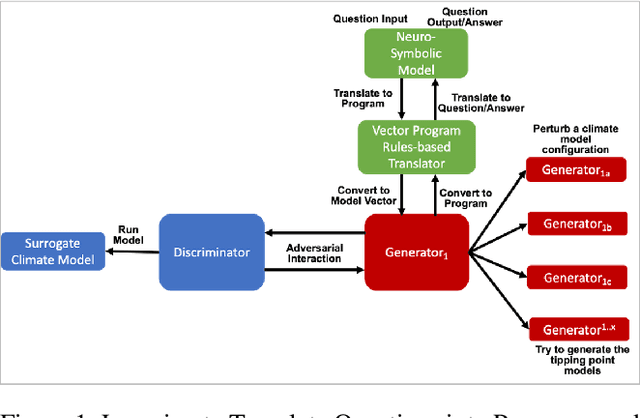
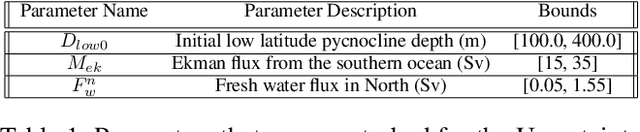
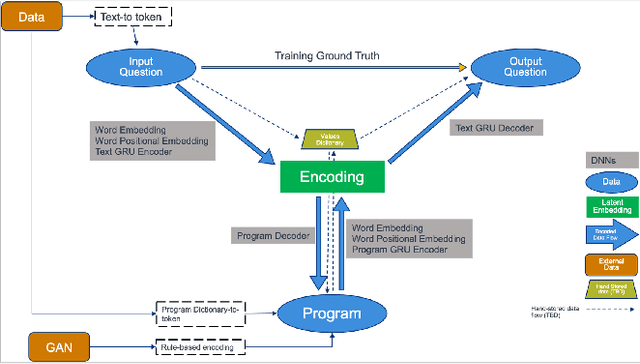
We propose a hybrid Artificial Intelligence (AI) climate modeling approach that enables climate modelers in scientific discovery using a climate-targeted simulation methodology based on a novel combination of deep neural networks and mathematical methods for modeling dynamical systems. The simulations are grounded by a neuro-symbolic language that both enables question answering of what is learned by the AI methods and provides a means of explainability. We describe how this methodology can be applied to the discovery of climate tipping points and, in particular, the collapse of the Atlantic Meridional Overturning Circulation (AMOC). We show how this methodology is able to predict AMOC collapse with a high degree of accuracy using a surrogate climate model for ocean interaction. We also show preliminary results of neuro-symbolic method performance when translating between natural language questions and symbolically learned representations. Our AI methodology shows promising early results, potentially enabling faster climate tipping point related research that would otherwise be computationally infeasible.
Detecting Anomalous Swarming Agents with Graph Signal Processing
Mar 17, 2021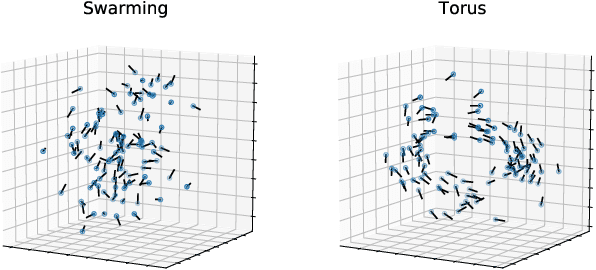
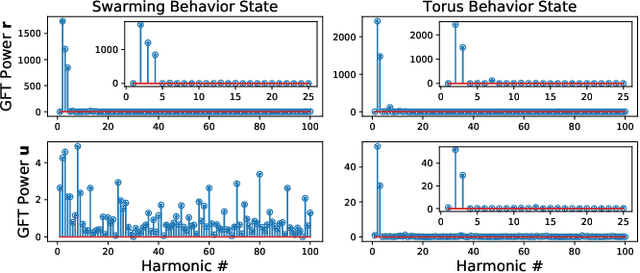
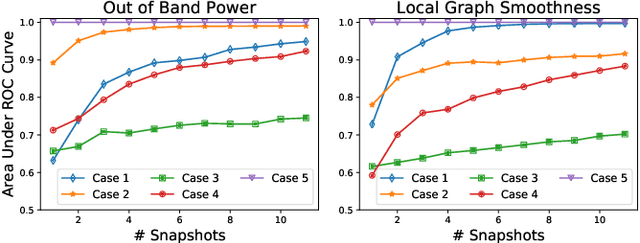
Collective motion among biological organisms such as insects, fish, and birds has motivated considerable interest not only in biology but also in distributed robotic systems. In a robotic or biological swarm, anomalous agents (whether malfunctioning or nefarious) behave differently than the normal agents and attempt to hide in the "chaos" of the swarm. By defining a graph structure between agents in a swarm, we can treat the agents' properties as a graph signal and use tools from the field of graph signal processing to understand local and global swarm properties. Here, we leverage this idea to show that anomalous agents can be effectively detected using their impacts on the graph Fourier structure of the swarm.
Towards Indirect Top-Down Road Transport Emissions Estimation
Mar 16, 2021

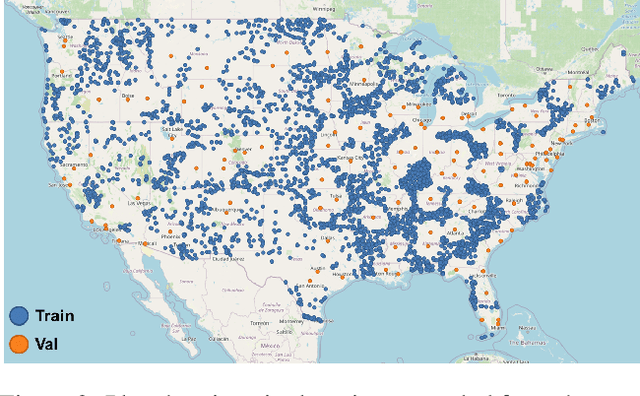

Road transportation is one of the largest sectors of greenhouse gas (GHG) emissions affecting climate change. Tackling climate change as a global community will require new capabilities to measure and inventory road transport emissions. However, the large scale and distributed nature of vehicle emissions make this sector especially challenging for existing inventory methods. In this work, we develop machine learning models that use satellite imagery to perform indirect top-down estimation of road transport emissions. Our initial experiments focus on the United States, where a bottom-up inventory was available for training our models. We achieved a mean absolute error (MAE) of 39.5 kg CO$_{2}$ of annual road transport emissions, calculated on a pixel-by-pixel (100 m$^{2}$) basis in Sentinel-2 imagery. We also discuss key model assumptions and challenges that need to be addressed to develop models capable of generalizing to global geography. We believe this work is the first published approach for automated indirect top-down estimation of road transport sector emissions using visual imagery and represents a critical step towards scalable, global, near-real-time road transportation emissions inventories that are measured both independently and objectively.
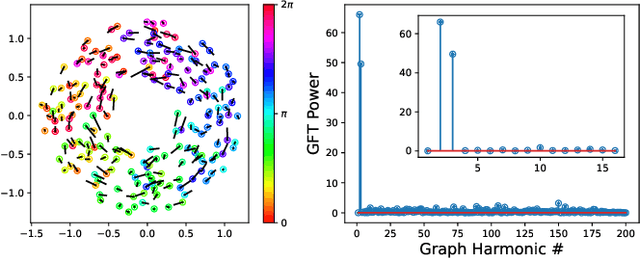
Analyzing Collective Motion Using Graph Fourier Analysis
Mar 15, 2021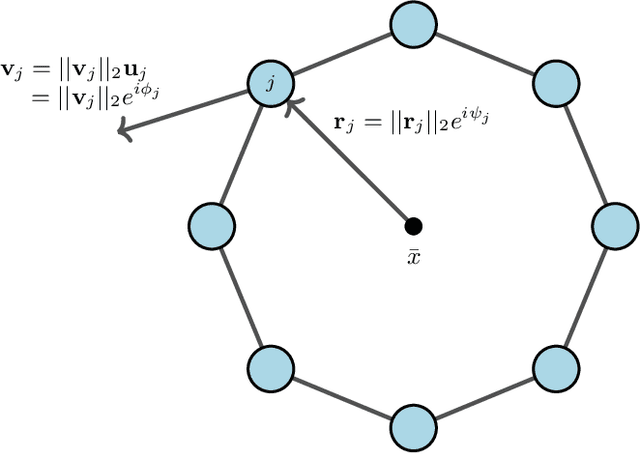
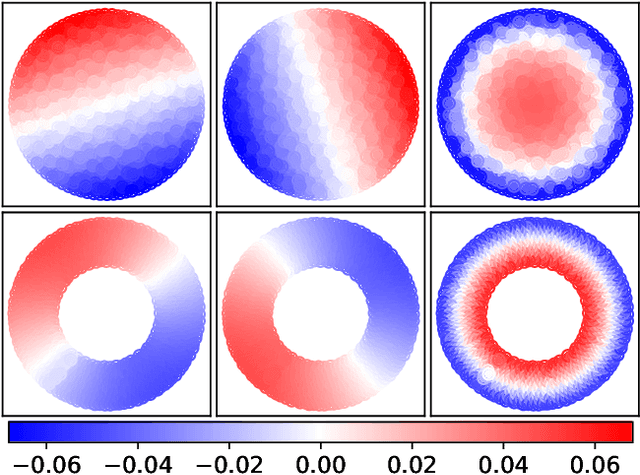
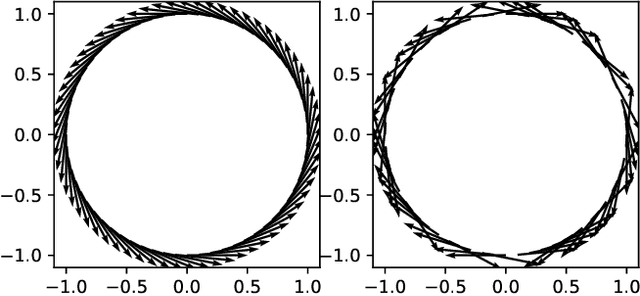
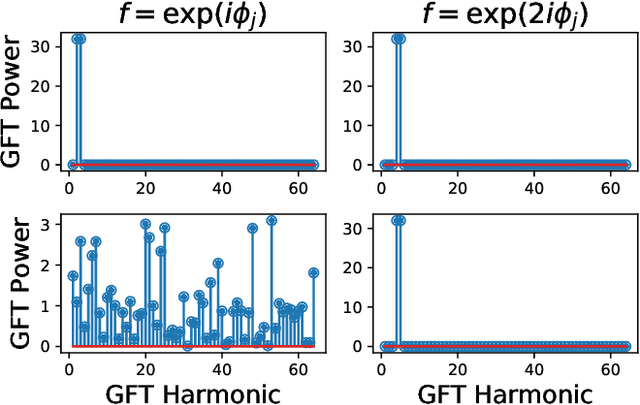
Collective motion in animal groups, such as swarms of insects, flocks of birds, and schools of fish, are some of the most visually striking examples of emergent behavior. Empirical analysis of these behaviors in experiment or computational simulation primarily involves the use of "swarm-averaged" metrics or order parameters such as velocity alignment and angular momentum. Recently, tools from computational topology have been applied to the analysis of swarms to further understand and automate the detection of fundamentally different swarm structures evolving in space and time. Here, we show how the field of graph signal processing can be used to fuse these two approaches by collectively analyzing swarm properties using graph Fourier harmonics that respect the topological structure of the swarm. This graph Fourier analysis reveals hidden structure in a number of common swarming states and forms the basis of a flexible analysis framework for collective motion.
Adaptive Stress Testing: Finding Failure Events with Reinforcement Learning
Nov 06, 2018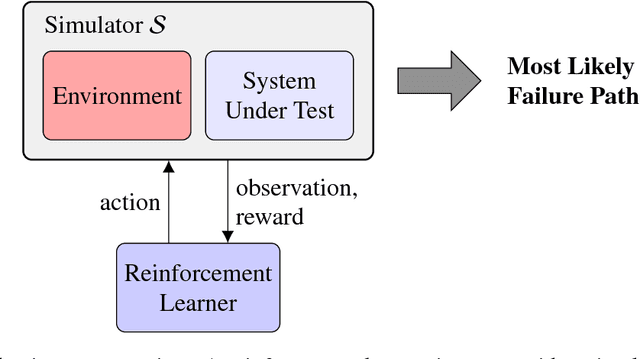
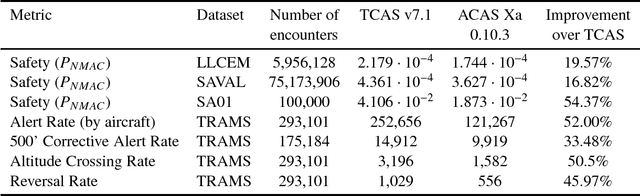
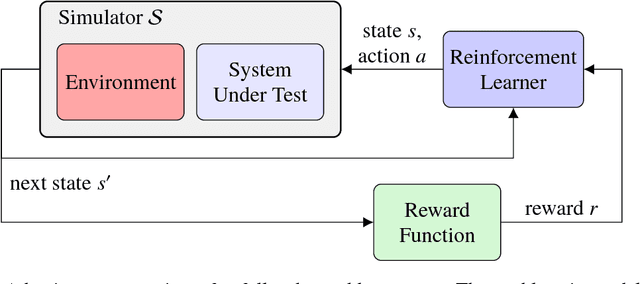
Finding the most likely path to a set of failure states is important to the analysis of safety-critical dynamic systems. While efficient solutions exist for certain classes of systems, a scalable general solution for stochastic, partially-observable, and continuous-valued systems remains challenging. Existing approaches in formal and simulation-based methods either cannot scale to large systems or are computationally inefficient. This paper presents adaptive stress testing (AST), a framework for searching a simulator for the most likely path to a failure event. We formulate the problem as a Markov decision process and use reinforcement learning to optimize it. The approach is simulation-based and does not require internal knowledge of the system. As a result, the approach is very suitable for black box testing of large systems. We present formulations for both systems where the state is fully-observable and partially-observable. In the latter case, we present a modified Monte Carlo tree search algorithm that only requires access to the pseudorandom number generator of the simulator to overcome partial observability. We also present an extension of the framework, called differential adaptive stress testing (DAST), that can be used to find failures that occur in one system but not in another. This type of differential analysis is useful in applications such as regression testing, where one is concerned with finding areas of relative weakness compared to a baseline. We demonstrate the effectiveness of the approach on an aircraft collision avoidance application, where we stress test a prototype aircraft collision avoidance system to find high-probability scenarios of near mid-air collisions.