 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Stress Testing: Finding Failure Events with Reinforcement Learning
Nov 06, 2018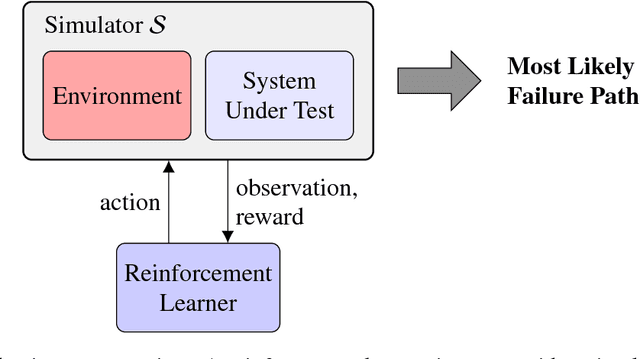
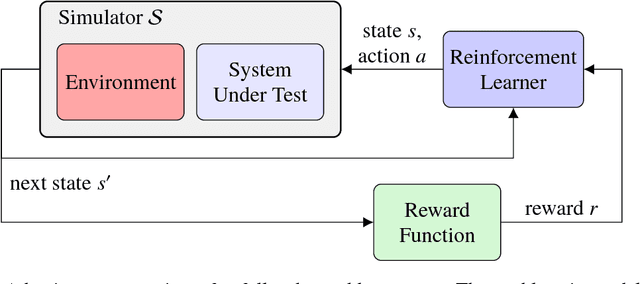
Finding the most likely path to a set of failure states is important to the analysis of safety-critical dynamic systems. While efficient solutions exist for certain classes of systems, a scalable general solution for stochastic, partially-observable, and continuous-valued systems remains challenging. Existing approaches in formal and simulation-based methods either cannot scale to large systems or are computationally inefficient. This paper presents adaptive stress testing (AST), a framework for searching a simulator for the most likely path to a failure event. We formulate the problem as a Markov decision process and use reinforcement learning to optimize it. The approach is simulation-based and does not require internal knowledge of the system. As a result, the approach is very suitable for black box testing of large systems. We present formulations for both systems where the state is fully-observable and partially-observable. In the latter case, we present a modified Monte Carlo tree search algorithm that only requires access to the pseudorandom number generator of the simulator to overcome partial observability. We also present an extension of the framework, called differential adaptive stress testing (DAST), that can be used to find failures that occur in one system but not in another. This type of differential analysis is useful in applications such as regression testing, where one is concerned with finding areas of relative weakness compared to a baseline. We demonstrate the effectiveness of the approach on an aircraft collision avoidance application, where we stress test a prototype aircraft collision avoidance system to find high-probability scenarios of near mid-air collisions.
Interpretable Categorization of Heterogeneous Time Series Data
Jan 26, 2018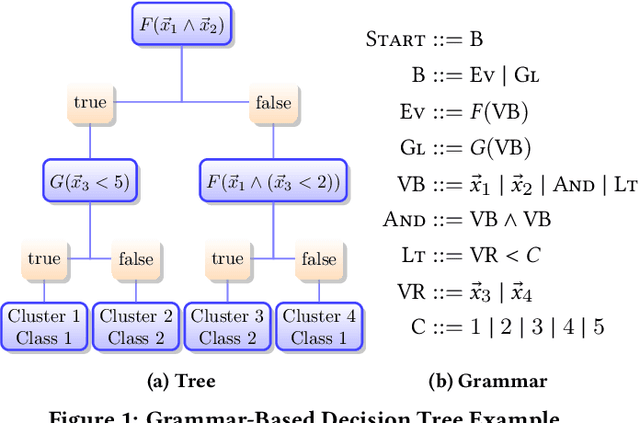
Understanding heterogeneous multivariate time series data is important in many applications ranging from smart homes to aviation. Learning models of heterogeneous multivariate time series that are also human-interpretable is challenging and not adequately addressed by the existing literature. We propose grammar-based decision trees (GBDTs) and an algorithm for learning them. GBDTs extend decision trees with a grammar framework. Logical expressions derived from a context-free grammar are used for branching in place of simple thresholds on attributes. The added expressivity enables support for a wide range of data types while retaining the interpretability of decision trees. In particular, when a grammar based on temporal logic is used, we show that GBDTs can be used for the interpretable classi cation of high-dimensional and heterogeneous time series data. Furthermore, we show how GBDTs can also be used for categorization, which is a combination of clustering and generating interpretable explanations for each cluster. We apply GBDTs to analyze the classic Australian Sign Language dataset as well as data on near mid-air collisions (NMACs). The NMAC data comes from aircraft simulations used in the development of the next-generation Airborne Collision Avoidance System (ACAS X).